Download
1 / 17
170 likes | 252 Views
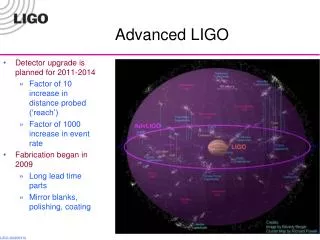
Current Work on Hydraulics for LIGO 1 and Advanced LIGO. JILA, LLO, LSU, MIT, Stanford.

E N D
Current Work on Hydraulics for LIGO 1 and Advanced LIGO JILA, LLO, LSU, MIT, Stanford Rich Abbott, Graham Allen, Daniel DeBra, Joe Giaime, Giles Hammond, Marcel Hammond, Corwin Hardham, Jonathan How, Wensheng Hua, Brian Lantz, Ken Mason, Rich Mittleman, Jamie Nichol, Joshua Phinney, Gerry Stapfer
Functional Description of the System ~10-7 m rms (0.1Hz), ~10-8 m rms (1Hz), ~4 10-10 m/√Hz ~10-7 m rms (0.1Hz), ~10-11 m rms (1Hz), 2 10-13 m/√Hz (10 Hz) 10-14 m rms differential, 10-19 m/√Hz (10 Hz) ~10-6 m rms above 0.1Hz ~10-8 m rms above 1Hz, ~4 10-10 m/√Hz at 10 Hz
View of the LIGO vacuum tanks BSC HAM
Motivation for an External Stage • Isolation • From the micro-seismic peak to 10 Hz • Alignment • Seasonal Temperature Changes • Control Reallocation • Reduce control effort / noise from inner stages • High Impedance Support • Inner stages react against stiff, damped foundation
Performance Requirements • Range of Motion • Mechanical Adjustment: 5 mm. • Active Control: +/- 1 mm. • Response • Initial Response: 1 mm. in 10 sec. • Bandwidth: .1 - 10 Hz. • Resolution and Noise • Reduce the ground motion by 10 from 0.1 to 3 Hz
Differential Bellows for Quiet Actuator 1) Pump 2) Differential Flapper Valve 3) Bellows Supply 4) Differential Bellows 5) Actuation Plate
The Quiet Hydraulic Actuator Displacement Sensor Bellows Servo Valve Actuation Plate Current Design Implemented On LIGO Pier Current Design
Conditioning a Pressure Source Active and Passive Suppression of Pressure Fluctuations Accumulator Compensator Pressure Sensor Pump Servo Valve Reservoir
The Test Platform at Stanford Vertical Actuator Displacement Sensor Seismometer (Geotech S-13) Seismometer (Streckeisen STS-2) 800 lb Test Mass Vertical Actuator Horizontal Actuator
Sensor Correction Compensator zm - zg + + zg External Alignment Input STS2 Filter
New Pumping Stand • Build new system withimproved low freq range, and capacity to drive 8 actuators. • Allow Stanford and LASTI to order identical stations (easier debugging). Reservoir Motor and pump Granite block(isolation)
New Pump Station is Progressing Motor controller Filter Accumulator Pressure sensor Motor Bypass valve Pump
Hydraulic Candidate Actuators Mechanical Noise Displacement Hysteresis Stiffness Stiction Velocity Force High Low Med Med Low Low Low Ball Screw High Low High High High Low High Linear Motor High High Low High Low Low Low Piezo orMagnetostriction High High High Low Low High Low
Equations of Motion Mass Volumes Flow Valve