Download
1 / 14
140 likes | 302 Views
Adaptive Secondary Software Components. What we use? IDL!. Historical reason from MMT336 unit. Fully checked procedure set suitable for firmware debugging Powerful data analysis and manipulation tools Easy interfacing with hardware Simple development of graphics. Where?. FIRMWARE.

E N D
What we use? IDL! • Historical reason from MMT336 unit. • Fully checked procedure set suitable for firmware debugging • Powerful data analysis and manipulation tools • Easy interfacing with hardware • Simple development of graphics Ad.Sec. Software Components
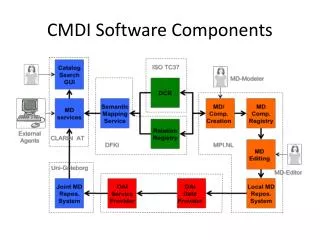
Where? FIRMWARE HW Ctrl HW Ctrl HARDWARE FIRMWARE IDL CORE AOSupervisor WFSDiag TCS WFSArb Wavefront Sensor A0Arbitrator AOS Adaptive Secondary Mirror AdsecArb MirrDiag HARDWARE IDL Ctrl IDL CORE Ad.Sec. Software Components
Basic Functions • Read/Write into Ad.Sec. hardware via MsgdRTDB • Configuration parameters upload: • DSP program loading • Setup of position control loop parameters (proportional gain, derivative gain, feed-forward matrix) • Electrical calibration (capacitive sensors, coils) • Large optical loop data (reconstructor matrix, reconstructor filters) Ad.Sec. Software Components
Characterization DCommand vectorfrom rec. Feed-forward force 300kHz@-3dB FikDck 70-140kHz CurrentDriverand coil Dci(t) + Delay DAC G + + - - - - e(t) v(t) p(t) Control loop of i-th actuator K d/dt MirrorShell Implementedcontrol schemedigital dataanalog data LIN ADC CapacitiveSensor + + 70-140kHz 90kHz@-3dB n(t) DIAGNOSTIC BUFFERS: ~1’ history • Setup the Ad.Sec. to monitor all low level variables and data post processing • Position sensors accuracy and noise spectral distribution • Proportional and derivative gain tuning • System transfer functions • Zonal and Modal step response • Flat position quality and time stability Ad.Sec. Software Components
Characterization • Setup the Ad.Sec. to monitor all low level variables and data post processing • Position sensors accuracy and noise spectral distribution • System transfer functions • Zonal and Modal step response • Flat position quality and time stability Ad.Sec. Software Components
Characterization • Setup the Ad.Sec. to monitor all low level variables and data post processing • Position sensors accuracy and noise spectral distribution • System transfer functions • Zonal and Modal step response • Flat position quality and time stability Ad.Sec. Software Components
Characterization • Setup the Ad.Sec. to monitor all low level variables and data post processing • Position sensors accuracy and noise spectral distribution • System transfer functions • Zonal and Modal step response • Flat position quality and time stability Ad.Sec. Software Components
Characterization • Setup the Ad.Sec. to monitor all low level variables and data post processing • Position sensors accuracy and noise spectral distribution • System transfer functions • Position step responses • Flat position quality and time stability Ad.Sec. Software Components
IDL-based complex procedures • Capacitive sensors calibration (non linear law...) • Feed-Forward matrix calibration • Flat shape for the thin shell • Setting the thin shell in working condition (70 mm from reference plate) Ad.Sec. Software Components
Example: setting the thin shell • Initial functionality tests: the capacitive sensors and electronics have to fully work, the gap must be free of contamination • Isostatic set: first the shell is pressed on the reference plate, after the currentsare slowly released and the mirror is supported by three actuatorsin closed loop and all the others in open loop with a bias current; mantaining minimum force variance, total forces and total momentum • Close loop: the three actuators currents are software integrated to reach the exact working position, after the control loop is closed on all actuators • Raise gains: the actuators control parameters now can be pumped up with small steps to achieve an high perfomances dynamic behaviour • Flat the mirror: the precalibrated step position is applied Time Scale: few minutes (1’-2’) When: only at the first time in the night or after an unrecoverable fault Ad.Sec. Software Components
Engineering GUI ScreenShots Ad.Sec. Software Components
Conclusions • IDL can be very useful to quickly have an idea of the status of the system • IDL is extensively used in the Ad.Sec. development, from characterization to calibration • IDL is used by the AO Supervisor to manage the Ad.Sec. and to make it fully configured and operating Ad.Sec. Software Components
END Ad.Sec. Software Components