Download
1 / 10
100 likes | 252 Views
5. Sizing program. 5.1. Procedure of sizing 5.2. Example: XZ-Module 5.3. Example Optimizing. The precise sizing of a linear motor system requires some complex calculations and knowlege about linear motor systems.

E N D
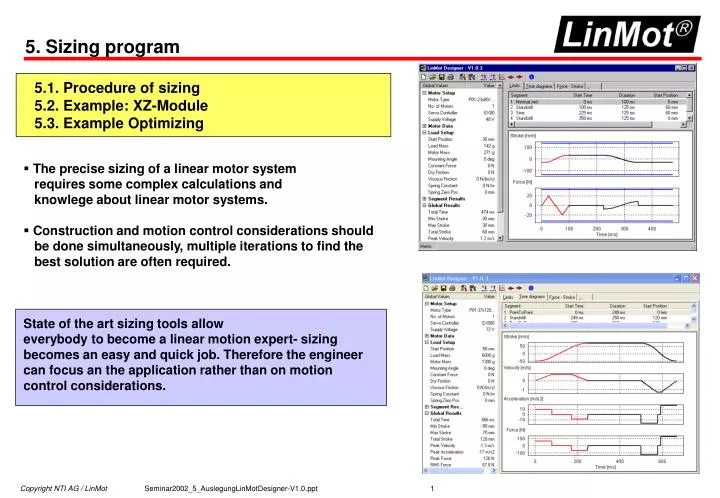
5. Sizing program 5.1. Procedure of sizing 5.2. Example: XZ-Module 5.3. Example Optimizing • The precise sizing of a linear motor system requires some complex calculations and knowlege about linear motor systems. • Construction and motion control considerations should be done simultaneously, multiple iterations to find the best solution are often required. • State of the art sizing tools allow everybody to become a linear motion expert- sizing becomes an easy and quick job. Therefore the engineer can focus an the application rather than on motion control considerations.
5.1. Procedure of sizing (2) Input of application data Separation of the cycle in different segments of movement Optimizing of ‚free parameters‘ decide about dwell times, moving times, ... Selection of a motor Linear motor, Controller test boundaries check for peak forces, continuous forces (power dissipation)
x 5.2. Example: XZ-Module (1) Task A gripper will be moved horizontal to pick and place a part. Goal: cycle time<= 1 s continuous operation Drawing • Technical data X-Axle • Horizontal stroke 140 mm • Mass of the X-axle 4 kg (+ slider mass 1kg) • Friction 10 N • Payload 150g (during return (140 bis 0 mm)) • Motor P01-37x240/160x360 • Technical data data Z-Axle • Vertical stroke 80 mm • pick and place time each 80 ms • Mass of the Z-unit 0.530 kg (+ slider mass 220g) • Payload 150g (during return (140 bis 0 mm)) • Motor P01-23x160/70x210 stroke
5.2. Example: XZ-Module (2) Step 1: defintion of the single segments X-Axes gripping Advancing motion Returning motion Placing 140 mm X2 X1 X3 X4 t Dwell time forplacing Dwell time for gripping process Z-axes Z1 Z2 Z3 Z4 80 mm 80 ms t down pick up
5.2. Example: XZ-Module (3) / LinMot Designer Local data (appears only during specific segment of the movement) Definition of the completecycle Selection of motor and controller Global data appears during the whole movement Simulation and results
5.2. Example: XZ-Module (4)/ Analysis of the z-movement Real worldmovement Power dissipation Critical limitation Total time for z-movement Including gripper time = 330 ms
5.2. Example: XZ-Module (2) / Analysis of the X-movement Real world movement 330 ms waiting for Z-Axe 330 ms waiting for Z-Axe Critical limitation Power dissipation Total cycle time 1,12 s
5.3. Example: XZ-Module: Optimizing (1) Open-loop Systems need time margins (t delay) to avoid collisions. Closed-loop Systems (Linear motors) don‘t need this time margin because the movements are always exactly the same. Often it is possible to overlap the movements as well.
5.3. Example: XZ-Module: Optimizing (2) Simple movement x z Cycle time: 1.12 sec Optimized movement 20% reduced cycle time with identical motor/controller X overlapped movement z Cycle time: 0.88 sec !
x 5.3. Example 2: Optimized ‚time partinioning‘ stroke • Horizontal stroke 100 mm • Cycle time 300 ms, • payload 500g (during return (100 bis 0 mm)) Using a symmetrical time partitioning (85 ms for forward movement, 115 ms for return movement) the system will be overloaded ( red cycles). Using a asymmetrical time partitioning (85 ms for forward movement, 115 ms for return movement) it works fine. The peak force will be reduced by 19 %, the RMS-force by 5 %!