Download
1 / 19
220 likes | 536 Views
Equations Non Linéaires. Equations linéaires, non-linéaires. Il n’est guère difficile de trouver la solution de l’équation linéaire a*x - b = 0 où a et b sont connus et x est l’inconnue. On écrit a*x = b et chaque membre de l’expression est divisé par a:

E N D
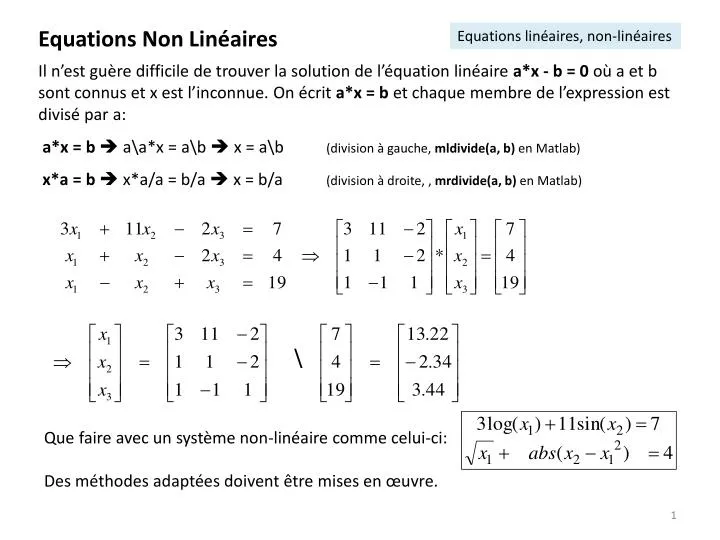
Equations Non Linéaires Equations linéaires, non-linéaires Il n’est guère difficile de trouver la solution de l’équation linéaire a*x - b = 0 où a et b sont connus et x est l’inconnue. On écrit a*x = bet chaque membre de l’expression est divisé par a: a*x = b a\a*x = a\b x = a\b(division à gauche, mldivide(a, b) en Matlab) x*a = b x*a/a = b/a x = b/a(division à droite, , mrdivide(a, b) en Matlab) Que faire avec un système non-linéaire comme celui-ci: Des méthodes adaptées doivent être mises en œuvre.
Equations Non Linéaires Méthode de la bissection (dichotomie) Trouver les « zéros » de fonctions non linéaires, les valeurs réelles telles que f()=0 Avantage: l’algorithme n’utilise que des évaluations de la fonction f
Equations Non Linéaires Méthode de Newton Cette méthodes’applique à des équations du type pour lesquelles on peut calculer ou estimer la dérivée de f : f’(x). Soit x1 une valeur initiale approchéede la racine inconnue: = x1 + h, on a et comme on en tire l’estimation de h la quantité à ajouter à x1 pour s’approcher de et générer une valeur x2= x1 + h : On en déduit la méthode:
Equations Non Linéaires Méthode de Newton, interprétation géométrique f(x) x xn xn+1 xn+2
x1 x3 x2 Equations Non Linéaires Méthode de Newton, convergence, arrêt f(x) La méthode ne converge pas toujours vers la solution. Dans l’exemple ci-contre il existe un changement de concavité qui amène à une oscillation des termes xn x
Equations Non Linéaires Méthode de Newton: contrôle sur le résidu e(k) = erreur = |x(k) - | résidu = f(x(k)) résidu résidu |f ’(x)| >> 1 (à gauche) critère trop restrictif: alors que l’erreur est faible, les itérations se poursuivent puisque le résidu est grand. |f ’(x)| << 1 (à droite) critère trop faible: ici le résidu est faible et conduit à l’arrêt des itérations alors que l’erreur est grande. On utilisera donc préférentiellement le contrôle sur l’incrément.
Equations Non Linéaires Méthode de Newton: systèmes d’équations non linéaires La méthode Newton peut s’appliquer à la résolution d’un système de plusieurs équations non linéaires : A partir d’un couple de valeurs approchées (x1, y1) d’une solution (, ) du système, on peut déterminer deux accroissements h et k à donner à x1 et y1de manière à ce que : En développant en 1er ordre, il vient :
Equations Non Linéaires Méthode de Newton: systèmes d’équations non linéaires Les quantités h et k s’obtiennent donc, en résolvant le système linéaire suivant : Sous forme matricielle, en posant J la matrice Jacobienne: J(x1, y1) = Généralisation: On peut noter de façon condensée (vectorielle):
Equations Non Linéaires Méthode de Newton: résumé R R On veut : f(x+h)=f(x) + h.f’(x) = 0 h = - f(x) / f’(x) À partir de x1, on calcule x2=x1+h1, puis x3, … Rn Rn
Equations Non Linéaires fzero, poignée de fonction La fonction fzero résout les équations non-linéaires du type : mafonction(x) = 0. Elle possède 2 entrées: a) une poignée* de la fonction dont on recherche le zéro et b) une valeur x0 initiale supposée proche du zéro de la fonction. Sa sortie est la valeur x= qui annule mafonction. >> fzero('cos', 2) % ou écrire: fzero(@cos, 2) ans = 1.5708 On peut évidemment affecter la sortie à une nouvelle variable: >> un_zero_de_cos = fzero(@cos, 2) % ceci résout: cos(x)=0 un_zero_de_cos = 1.5708 Essayons avec ma fonction >> u=fzero(@mafonction, 2) u = 1 >> u=fzero(@mafonction, -10) u = -1.0000 % ces 2 dernières commandes résolvent: x.^2-1 = 0 function y=mafonction(x) y=x.^2-1; end * Une poignée est un type de variable désignant les fonctions. Elle est construite en ajoutant un ‘@’ davant le nom de la fonction, ou en la créant comme une fonction anonyme.
Equations Non Linéaires fzero, fonctions paramétrées Les choses peuvent se compliquer si la fonction cible est paramétrée, et possède donc plus d’une entrée comme dans la version ci-contre: function y=mafonction(p, x) y = x.*cos(x)+p; end Une façon d’utiliser fzero (qui n’accepte que des fonction à une seule entrée) est de créer une fonction anonyme en fixant d’abord la valeur du paramètre: >> p = 5; >> mafonction2 = @(x) mafonction(p, x); % mafonction2 possède une seule entrée >> ezplot(mafonction2, [-10, 2]) >> grid >> fzero(mafonction2, -5) ans = -5.3125 >> fzero(mafonction2, 0) ans = 3.0217
Equations Non Linéaires fzero, options, optimset En réalité, fzero peut posséder 2 ou 3 entrées: >> x = fzero(fun, x0, options) où options est une entrée qui va permettre, par exemple d’indiquer avec quelle tolérance la recherche du zéro doit être réalisée. Pour connaitre les options disponibles avec fzero, on utilise la commande optimset. On voit que par défaut, fzero recherche le zéro d’une fonction jusqu’à une tolérance égale à eps(1). >> options = optimset(@fzero) options = Display: 'notify' MaxFunEvals: [] MaxIter: [] TolFun: [] TolX: 2.2204e-016 … Pour changer la valeur de l’option ‘param’, il faut utiliser la syntaxe suivante pour optimset: options = optimset(old_options, ‘param', new_value) Ainsi, pour changer le critère d’arrêt, on écrira: >> new_opt = optimset(options, 'tolx', 1e-6) On pourra par la suite exécuter fzero avec les nouvelles options qu’onluipassera: >> x = fzero(fun, x0, new_opt ) new_opt = Display: 'notify' MaxFunEvals: [] MaxIter: [] TolFun: [] TolX: 1.0000e-006 …
Equations Non Linéaires Exercice: erreur de la méthode de dichotomie En observant que l’erreur est bornée: Etablir le nombre d’itérations minimal qui garantisse: où est une tolérance donnée.
Equations Non Linéaires Exercice: Volume d’un gaz réel On considère le dioxyde de carbone (CO2), pour lequel a=0.401 Pa.m6 et b=42.7 10-6 m3. Donner le volume occupé par N=1000 molécules de CO2 à la température T=300 K et à la pression p=3.5 107 Pa et avec une tolérance de 10-9. On donne k=1.38 10-23Joule.K-1.
Equations Non Linéaires Exercice: matrice jacobienne Soit la fonction F de R2 R2: Calculer l’expression de sa matrice jacobienne JF (X). En déduire JF([1; 2]). La fonction jacobimatrice ci-contre évalue numériquement la matrice jacobienne d’une fonction fun. Etudier chaque ligne de cette fonction. Appliquer la à la fonction F définie au-dessus et vérifier le résultat obtenu pour JF([1; 2]). Pourquoi a t’il été ajouté « eps » dans la définition de dx ? function [J, y0]=jacobimatrice(fun, x0) % Jacobimatrice calcule la matrice jacobienne J de la % fonction fun évaluée au point x0. % y0 = fun(x0). % fun est une poignée de fonction. % Exemple pour une fonction R^3 ==> R^2: % >> f=@(x) [x(1)*x(2)^2+x(3); x(1)*x(3)^2-x(2)]; % >> x0 = [1, 2, 3]; % [J, y0]=jacobimatrice(f, x0) % J = % 4 4 1 % 9 -1 6 % y0 = % 7 % 7 y0 = fun(x0); n = length(x0); m = length(y0); J = zeros(m, n); dx = x0/1000 + eps; for k=1:n x0p=x0; x0m=x0; x0p(k)=x0p(k)+dx(k); x0m(k)=x0m(k)-dx(k); J(:,k)=(fun(x0p)-fun(x0m))/2/dx(k); end end
Equations Non Linéaires Exercice: écrire une fonction newton function [x, niter]=newton(f, x0, tolx, maxiter) % trouve la solution par la méthode de Newton % d’un système d’équations non-linéaires pouvant % se mettre sous la forme % f(x)=0 où f est une fonction de R^n dans R^n % X = valeur telle que f(X) = 0 à TOLX prés % NITER = nombre d'itérations effectuées % % F = poignée de la fonction % X0 = valeur initiale des itérations % TOLX = tolérance sur l'incrément: % si norm(x(k+1)-x(k))< tolx alors arrêt % MAXITER = nombre maximal d'itérations à effectuer % % exemple dans R^1: % f=@(x) sin(2*x) -1 + x; % [x, niter]=newton(f, 0.5, 1e-8, 100) % x = % 0.3523 % niter = % 4 % % exemple dans R^3 % f=@(x)[x(1)+x(2)^2+x(3);x(1)+x(3)^2-x(2); sum(x)]; % x0 = [1; 2; 3]; % [x, niter]=newton(f, x0, 1e-8, 100) % x = % -3.0000 % 1.0000 % 2.0000 % niter = % 6 Copier, tester et débugger la fonction NEWTON donnée ici. Elle fait appel à la fonction jacobimatrice étudiée plus haut dans ce chapitre. x0=x0(:); continuer=true; niter=0; while continuer xold=x; J=jacobimatrice(f, xold); x=xold-J\f(xold); niter=niter+1; if niter>maxiter, continuer=false; end if norm(x-xold)<tolx, continuer=false; end end end
Equations Non Linéaires Exercice: modifier une fonction newton function [x, niter]=newton(f, x0, tolx, maxiter) % trouve la solution par la méthode de Newton % d’un système d’équations non-linéaires pouvant % se mettre sous la forme % f(x)=0 où f est une fonction de R^n dans R^n % X = valeur telle que f(X) = 0 à TOLX prés % NITER = nombre d'itérations effectuées % % F = poignée de la fonction % X0 = valeur initiale des itérations % TOLX = tolérance sur l'incrément: % si norm(x(k+1)-x(k))< tolx alors arrêt % MAXITER = nombre maximal d'itérations à effectuer % % exemple dans R^1: % f=@(x) sin(2*x) -1 + x; % [x, niter]=newton(f, 0.5, 1e-8, 100) % x = % 0.3523 % niter = % 4 % % exemple dans R^3 % f=@(x)[x(1)+x(2)^2+x(3);x(1)+x(3)^2-x(2); sum(x)]; % x0 = [1; 2; 3]; % [x, niter]=newton(f, x0, 1e-8, 100) % x = % -3.0000 % 1.0000 % 2.0000 % niter = % 6 • Modifier la fonction newton ci-contre de façon à ce quelle renvoie le vecteur x =[x0, x1, ..., xn] des itérations successives et où x0 est la valeur initiale et xn est la solution à tolx prés. • newton peut-elle résoudre x^3-1=0 ? (voir http://fr.wikipedia.org/wiki/Fractale_de_Newton) x0=x0(:); continuer=true; niter=0; while continuer xold=x; J=jacobimatrice(f, xold); x=xold-J\f(xold); niter=niter+1; if niter>maxiter, continuer=false; end if norm(x-xold)<tolx, continuer=false; end end end Suite du fichier
Equations Non Linéaires Exercice: Recherche d’une valeur initiale Objectif: résoudre le système ci-contre, avec la méthode de Newton. On prendra tolx=10-12 Soit f1(x, y) = x2 – 2xy – 2 = 0 f2(x, y) = x + y2 + 1 = 0 Selon la valeur initiale donnée à l’algorithme itératif, la convergence vers la solution peut échouer. De même, on ne sait pas si il existe zéro, une ou plusieurs solutions. Une approche graphique est possible pour les systèmes à 2 variables. Représenter la surface z(x,y)=f12(x,y) +f22(x,y) en utilisant les fonctions meshgrid et surf. Pourquoi est-il plus efficace de représenter z=log10(f12(x,y) +f22(x,y)) ? En déduire une estimation de la ou des solutions. b) Appliquer la méthode de Newton avec cette ou ces estimations comme valeur(s) initiale(s). {
Equations Non Linéaires Exercice: applications pour la fonction newton.m a) Résoudre le système ci-dessous, avec la méthode de Newton. On prendra tolx=10-6. 2x1 - x2 = exp(-x1) -x1 + 2x2 = exp(-x2) b) Trouver la matrice X telle que X * X * X = Sol: X =