Download
1 / 26
260 likes | 359 Views
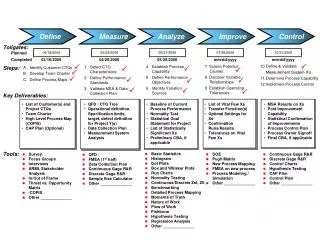
宇宙科学技術連合講演会 北九州国際会議場 Nov. 10, 2006. 準天頂衛星サブメータ級補強信号の エフェメリスメッセージ. 坂井 丈泰、福島 荘之介、武市 昇、伊藤 憲 電子航法研究所. Introduction. 準天頂衛星システムの開発が進められている: 当面は1機を打ち上げ( 2009 年を予定)、実証試験を目指す。 GPS 補完信号( L1C/L2C/L5 )・補強信号( L1-SAIF 他)を放送。

E N D
宇宙科学技術連合講演会 北九州国際会議場 Nov. 10, 2006 準天頂衛星サブメータ級補強信号の エフェメリスメッセージ 坂井 丈泰、福島 荘之介、武市 昇、伊藤 憲 電子航法研究所
Introduction • 準天頂衛星システムの開発が進められている: • 当面は1機を打ち上げ(2009年を予定)、実証試験を目指す。 • GPS補完信号(L1C/L2C/L5)・補強信号(L1-SAIF他)を放送。 • サブメータ級補強信号(L1-SAIF)は、ICAO SBASと互換の信号形式によりGPSに対する広域補強情報(ディファレンシャル補正およびインテグリティ情報)を放送する。 • L1-SAIF信号のメッセージ形式を検討中。 • 補強信号のためのエフェメリス情報: • L1-SAIF信号は測距にも利用可能。ただし、測位に使うには準天頂衛星のエフェメリス情報が必要。 • エフェメリス情報を放送するためのメッセージ形式を設計した。 • 1メッセージに収まる212ビットのデータサイズで、15分以上にわたり有効なエフェメリス情報を放送可能との見通しを得た。
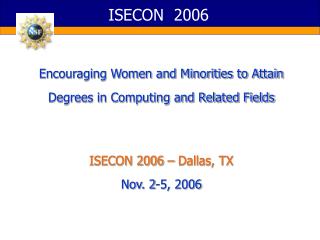
準天頂衛星の軌道 傾斜地球同期軌道(IGSO) =8の字軌道 60 楕円軌道 Latitude, deg 0 地球 静止軌道(GEO) 高度35,786km SBAS -60 低軌道衛星(LEO) NNSS(極軌道) 90 180 Longitude, deg 中軌道衛星(MEO) GPS, GLONASS, Galileo • 東経140度を中心に配置した場合の地上軌跡の例 • 離心率0、軌道傾斜角55度
サブメータ級補強信号(L1-SAIF) • 我が国全域を対象としたディファレンシャル補正情報: • 広域ディファレンシャルGPS(WADGPS)。 • ベクトル補正方式:衛星軌道、クロック、電離層伝搬遅延をそれぞれ別々に補正。 • 補強対象:GPS、準天頂衛星、(ガリレオ)。目標精度=1m。 • すでに実用化されているSBASをベースとして開発。 • GPS L1周波数で放送: • GPSと同一のアンテナ・フロントエンドで受信可能。 • 測距信号として利用可能。 • L1-SAIF信号(Submeter-class Augmentation with Integrity Function)。 • インテグリティ情報あり: • 信頼性の高い位置情報を提供。
補完信号と補強信号 信号の 種類 測距信号 測位機能 安全・緊急応用 既存受 信機で 受信可 測距 機能 軌道・ クロック情報 ディファ レンシャ ル補正 TTFF 改善 インテ グリティ 情報 災害 情報等 放送 L1C信号 (補完信号) × ◎ ○ × × (他衛星は不可) × × L1-SAIF 信号 (補強信号) △ (要改修) ○ (L1-C/Aと同じ) ○ ◎ (1mより良い) ○ (全衛星が対象) ◎ ○ L1-C/A 信号 (補完信号) △ (要改修) ○ ○ × × × × (参考)MSAS (補強信号) ○ (SBAS対応受信機) ○ (L1-C/Aと同じ) ○ ○ × ◎ × • L1-SAIFは、L1-C/Aの機能をすべて含む。 • L1-C/Aであっても、既存受信機では受信できない(PRNコードや航法メッセージがGPSとは異なる)。 今回の検討対象
L1-SAIFメッセージの設計方針 • 前提条件: • サブメータ級の測位精度が実現可能。 • SBASに対して可能な限りの互換性。 • 既存SBAS受信機は、L1-SAIF信号は受信しない。 • PRNコードが異なるので、受信できない:誤動作の恐れはない。 • 現行SBASメッセージに対して完全上位互換とする。 • クロック・軌道補正等の基本的な補強情報は、SBASと同一のメッセージとする:処理プログラムの共通化。 • L1-SAIF対応受信機は、同一の処理ルーチンでSBASメッセージも処理できる:L1-SAIFに対応すれば、SBASにも自動的に対応する。 • メッセージの変更はしない。追加により対応。 • 追加メッセージは電離層遅延補正および追加機能(QZSエフェメリスなど)で定義・利用。数個程度を想定。
SBASメッセージ プリアンブル 8ビット メッセージタイプ 6ビット データ領域 212ビット CRCコード 24ビット 250ビット メッセージ タイプ 内 容 更新間隔 (秒) メッセージ タイプ 内 容 更新間隔 (秒) 0 テストモード(使用不可) 6 17 GEOアルマナック 300 1 PRNマスク情報 120 18 IGPマスク情報 300 2~5 高速補正(FC+UDRE) 60 24 高速補正・長期補正 6 6 インテグリティ情報(UDRE) 6 25 長期補正 120 7 高速補正の劣化係数 120 26 電離層遅延補正(+GIVE) 300 9 GEO航法メッセージ 120 27 SBASサービスメッセージ 300 10 劣化係数 120 28 クロック・軌道情報共分散 120 12 SBAS時刻情報 300 63 NULLメッセージ —
QZSエフェメリス • 補強信号を測距に使うには、エフェメリス情報が必要。 • QZS補完信号に含まれる(QZS自身の)エフェメリス情報: • L1 C/A: Legacy NAVメッセージ(50bps)。 • L2C: CNAVメッセージ(MT方式) • L5: CNAVメッセージ(MT方式) • L1C: CNAV-2メッセージ(MT方式) いずれもJAXAが作成・放送 • オプション(1):エフェメリスを放送しない • L1 C/A、L2C、L5、L1Cのいずれかのエフェメリスを使うことにする。 • L1-SAIF信号を補完信号と独立して利用することはできない。 • エフェメリスのためのメッセージは不要。 • オプション(2):エフェメリスを放送する ←こちらとする • L1-SAIF信号だけで測距が可能。補完信号を受信しなくてよい。 • エフェメリスを送るためのメッセージを新設する必要がある。
エフェメリスメッセージ設計方針 • 可能な限り1メッセージ(212ビット)に納める: • 長期補正情報(分解能12.5cm)との組合せを前提としてもよい。 • 少なくとも15分程度にわたり有効な情報とする: • エフェメリスが更新されると長期補正情報も変更となる。 • 速度・加速度方式の場合は15分にわたる積分を考慮。15分後に30cm=1ns程度以内の積分誤差としたい。 • ただし、アベイラビリティ確保のため、更新がなくても毎分1回程度は放送する。 • サブメータ級測位に必要な分解能を持たせる: • 長期補正情報の分解能は12.5cm。これより細かい必要はない。 • クロック補正値については、±1msまでカバーする: • 衛星の測位ペイロード製造サイドの要請。
人工衛星の軌道の表現 • 人工衛星の運動は、ケプラーの法則に従う。 • 楕円軌道はケプラーの6要素で表現できる。GPS航法メッセージでは、摂動項を追加した15要素が放送される。 • 軌道パラメータはMCS(主制御局)が推定・予測し、1日に1回衛星にアップロードされる。 • 各GPS衛星は、自身の軌道パラメータ(エフェメリス)を放送している。さらに、アルマナックとして全衛星の概略の軌道パラメータも放送。 • GLONASSおよびSBASでは、ECEF直交座標値を直接放送する。GLONASSは周回衛星なので、定常加速度を省いた摂動項のみを放送。
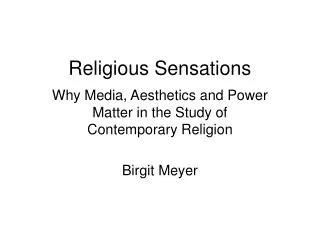
ケプラー軌道の6要素 長半径 離心率 軌道傾斜角 昇交点赤経 近地点引数 真近点角 a e i W w n 衛星 近地点 赤道面 春分点方向 昇交点 (1)楕円の形状を長半径 a,離心率 e で決める。 (2)慣性系に対する軌道面の方向を軌道傾斜角 i,昇交点赤経 Wで与える。 (3)近地点引数 wにより、軌道面内における楕円の向きを指定する。 (4)エポック時点における衛星の位置を真近点角 nにより与える。
GPSのエフェメリス情報 項目 ビット数 内容 項目 ビット数 内容 e 32 離心率 toc 16 エポック時刻 toe 16 エポック時刻 sqrt A 32 軌道長半径 af0 22 クロック補正 dot W 24 Wの変化率 af1 16 クロック補正 dot i 14 iの変化率 af2 8 クロック補正 Crc 16 補正値 M0 32 平均近点角 Crs 16 補正値 Cuc 16 補正値 W0 32 昇交点赤経 w 32 近地点引数 Cus 16 補正値 i0 32 軌道傾斜角 Cic 16 補正値 Dn 16 補正値 Cic 16 補正値 合計 420
GLONASSのエフェメリス情報 項目 ビット数 範囲 分解能 内容 tb 7 15~1425 min 15 min エポック時刻 tn(tb) 22 ±2-9 s 2-30 s クロック補正(0次) gn(tb) 11 ±2-30 s/s 2-40 s/s クロック補正(1次) Xn(tb) 27 ±27000 km 2-11 km ECEF座標 (PZ-90) Yn(tb) 27 ±27000 km 2-11 km Zn(tb) 27 ±27000 km 2-11 km dXn(tb) 24 ±4.3 km/s 2-20 km/s 速度 dYn(tb) 24 ±4.3 km/s 2-20 km/s dZn(tb) 24 ±4.3 km/s 2-20 km/s ddXn(tb) 5 ±6.2 mm/s2 2-30 km/s2 加速度 (摂動項のみ) ddYn(tb) 5 ±6.2 mm/s2 2-30 km/s2 ddZn(tb) 5 ±6.2 mm/s2 2-30 km/s2 合計 208 • 数値積分が必要。加速度の摂動項以外については、ICDに計算方法の記載がある。
SBASのエフェメリス情報 項目 ビット数 範囲 分解能 内容 t0,GEO 13 0~86384 s 16 s エポック時刻 URA 4 0~15 ー 測距精度 XG 30 ±42950 km 0.08 m ECEF座標 (WGS-84) YG 30 ±42950 km 0.08 m ZG 25 ±6710 km 0.4 m dXG 17 ±40.96 m/s 0.625 mm/s 速度 dYG 17 ±40.96 m/s 0.625 mm/s dZG 18 ±524.288 m/s 4 mm/s ddXG 10 ±6.4 mm/s2 12.5 mm/s2 加速度 ddYG 10 ±6.4 mm/s2 12.5 mm/s2 ddZG 10 ±32 mm/s2 62.5 mm/s2 aGf0 12 ±0.9537 ms 2-31 s クロック補正(0次) aGf1 8 ±0.11642 ns/s 2-40 s/s クロック補正(1次) 合計 204
各方式の比較 • GPS方式(6要素): • 長時間にわたり有効なエフェメリス情報を提供できる。 • 補正値のビット数を減らせば、全体のビット数を抑えられる可能性あり。この場合、位置精度がどのような性質となるか要検討。それにしても半減できるかどうか? • JAXAから受け取る軌道情報はITRF2000の座標値なので、整合しない。 • 補完信号のエフェメリスをそのままコピーしてもよい。 • GLONASS方式・SBAS方式(ECEF座標値): ←こちらを採用 • 所要ビット数が少なく、1メッセージに収まる可能性がある。 • JAXAから受け取る軌道情報をもとにエフェメリスを作成できる。また、広域補正プログラムが計算する衛星位置とも整合する。 • 時間の経過に対する位置精度の劣化の程度(積分誤差)について要検討。 • 数値積分が必要で、任意の時刻の衛星位置を計算するには若干手間(あるいは時間)がかかる。
QZSの位置・速度・加速度 X座標 Y座標 Z座標 (離心率 = 0.1) ※加速度は摂動項のみ
エフェメリス情報の性質 衛星位置誤差 → 衛星位置誤差 → エポック時刻 エポック時刻 • (波打ちタイプ) • エポック時刻における初期値の精度は良いが、時間の経過とともに位置誤差が増大する。 • ディファレンシャル補正をしても、すぐに再度の補正が必要となる。 • (定常タイプ) • エポック時刻における初期値に誤差が含まれるが、時間が経過してもその誤差があまり変化しない。 • ディファレンシャル補正情報の有効期限が長い。 • こちらのタイプを目指す
クロック補正情報 • クロック補正(0次):aQf0 • GPS・SBASは 2-31s = 14cm、GLONASSは 2-30s = 28cm の分解能。 • サブメータ級なので、エフェメリスとしてはGLONASS程度の分解能で十分。 • 衛星サイドの要請により、±1msの補正範囲をカバーしたい。 • log2 (10-3/2-30) = 21 より、符号を入れると 22ビット が必要。 • クロック補正(1次):aQf1 • GPSは 2-43s/s = 1.137×10-13s/s、GLONASS・SBASは 2-40s/s = 9.095×10-13s/s の分解能。 • 15分間=900秒間で30cmの変化に相当するクロックドリフト量は、およそ1ns/900s = 10-12s/s。これはGLONASS・SBASの分解能とほぼ同じ。 • GPSと同様、±3.725ns/s の補正範囲をカバーする。 • log2 (3.725×10-9/2-40) = 12 より、13ビット が必要。
衛星位置情報(位置) 離心率 遠地点距離(km) 赤道面における 遠地点位置(km) 近地点速度(m/s) 0 42164 29815 3075 0.1 46381 32796 3399 0.2 50597 35777 3766 0.3 54813 38759 4190 0.4 59030 41740 4697 • 衛星位置:XQ, YQ, ZQ • 「遠地点位置」(軌道傾斜角45度)をカバーするためには、離心率0.3まで考慮しても±38759km程度の範囲を表現できればよい。 • サブメータ級測位のためには20cm程度の分解能が必要。ただし、補正情報の適用が前提であれば、GPSと同様の1~3m程度の精度でもよい。 • SBASエフェメリス(30ビット、分解能0.08m)を参考に、分解能1.28m、26ビットとする。
衛星位置情報(速度・加速度) • 衛星速度:dXQ, dYQ, dZQ • 最大速度(近地点速度)は、離心率0.3まで考慮しても±4190m/sまでカバーすればよい。 • 15分間=900秒間で30cmの位置誤差に相当する速度変化は、およそ30cm/900s = 0.333mm/s。 • log2 (4190/0.5×10-3) = 23 より、符号を入れると 24ビット が必要。 • 衛星加速度:ddXQ, ddYQ, ddZQ • GLONASS方式を採用することとすると、地球重力ポテンシャルを除いた摂動項のみを考慮すればよい。 • 15分間=900秒間で30cmの位置誤差に相当する加速度変化は、およそ2×30cm/900s/900s = 0.741mm/s2。 • GLONASSでは ±6.2mm/s2の範囲。準天頂衛星は軌道半径が大きく、衛星本体も大型なことから、±32mm/s2まで広げておくこととした。 • log2 (32×10-6/2×10-6) = 4 より、符号を入れると 5ビット が必要。
エポック時刻など • エポック時刻:t0,Q • SBASは13ビットにより0~86400秒を16秒単位で表現。 • QZSSは周回衛星なので、エポック時刻はメッセージ送信時刻と大きく違わないものと思われる。86400秒(1日)まで表現できる必要はない。 • 60秒の分解能で0~10740秒(3時間)を表現することとすると、8ビット ですむ。 • 8ビットのエポック時刻がIODE(軌道情報の発行番号)も兼ねることとする。 • URA • GPS・SBASで測距精度を表す 4ビット の指標値。 • L1-SAIF信号を補正情報なしでも使用可能とするため、GPS・SBASと同じ内容のまま残すこととする。
QZSエフェメリスメッセージ 項目 ビット数 範囲 分解能 内容 t0,Q 8 0~10740 s 60 s エポック時刻 URA 4 0~15 ー 測距精度指標 XQ 26 ±42950 km 1.28 m ECEF座標 YQ 26 ±42950 km 1.28 m ZQ 26 ±42950 km 1.28 m dXQ 24 ±4.194 km/s 0.5 mm/s 速度 dYQ 24 ±4.194 km/s 0.5 mm/s dZQ 24 ±4.194 km/s 0.5 mm/s ddXQ 5 ±32 mm/s2 2 mm/s2 加速度 (摂動項のみ) ddYQ 5 ±32 mm/s2 2 mm/s2 ddZQ 5 ±32 mm/s2 2 mm/s2 aQf0 22 ±1.953 ms 2-30 s クロック補正(0次) aQf1 13 ±3.725 ns/s 2-40 s/s クロック補正(1次) 合計 212
積分誤差の評価(300秒) • 積分誤差のみを評価。 • 各軸とも±10cm以下。
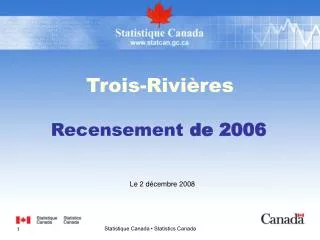
積分誤差の評価(900秒) • X軸・Y軸に周期的な変動が現れる。 • X軸・Y軸は±40cm、Z軸については±30cm以下程度。
回線容量の検討 内容 タイプ 放送周期 所要メッセージ数 放送回数(毎分) 高速補正 2~5 10 s 3 18 長期補正 25 60 s 4 4 電離層補正 26 60 s 2 2 対流圏補正 TBD 60 s 4 4 QZSエフェメリス TBD 30 s 1 2 高速補正劣化係数 7 60 s 1 1 劣化係数 10 60 s 1 1 PRNマスク 1 60 s 1 1 IGPマスク 18 60 s 2 2 C-E共分散 28 60 s 10 10 合 計 45 マ ー ジ ン 15
Conclusion • 準天頂衛星L1-SAIF補強信号のメッセージ形式を検討中: • L1-SAIF信号を測位に使うには準天頂衛星のエフェメリス情報が必要。 • 準天頂衛星用のエフェメリスメッセージを設計した: • GLONASS方式(ECEF座標値を直接放送、数値積分により衛星位置を計算する)を採用。 • 1メッセージ=212ビットに収まるデータ量で、15分以上にわたり有効なエフェメリス情報が得られる。 • 15分間の積分誤差は±40cm程度の見込み。 • 今後の検討課題: • 対流圏補正・電離層補正のメッセージ形式検討。 • L1-SAIF ICD(インターフェース管理文書):補完信号と一体の文書として作成作業中。