Download
1 / 26
260 likes | 474 Views
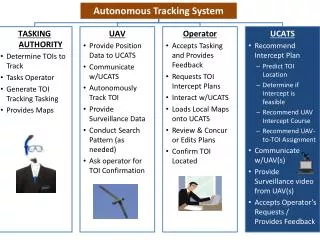
Ultrasonic Tracking System. Group # 4 4/22/03 Bill Harris Sabie Pettengill Enrico Telemaque Eric Zweighaft. Overview. Objective Motivation Specifications Design Approach Results Design Evaluation Conclusion. Objective.

E N D
Ultrasonic Tracking System Group # 4 4/22/03 Bill Harris Sabie Pettengill Enrico Telemaque Eric Zweighaft
Overview • Objective • Motivation • Specifications • Design Approach • Results • Design Evaluation • Conclusion
Objective • Design a pan/tilt system which acts as a tracking device using ultrasonic transmitters and receivers
Motivation • Applications of tracking are basic tasks worked on by engineers in various fields • Aerospace- Flight control radar • Defense- Smart targeting smart weapons • Sensors- Smart collision sensors on cars • Incorporation of tracking in model teaches fundamentals of sensor technology in conjunction with control technology
Specifications • The system will track objects between 2 and 10 meters from the array • The system will track objects between 0 and 2 meters off the ground • The system will track items within .5 degree of accuracy (within 10 cms of the object with beacon) • The system must be able to track the beacon at the speed of a human walking (.64 rad/sec)
Design Approach • CAD and Matlab used to model core pan/tilt system with addition of • Motors, belts, gears, pulleys • L shaped sensor structure • Laser pointer • Linear simulation of system with • Matlab • Simulink diagrams
Key Issues L Shape sensor mount Mounting sensors on to the beams Cad drawing of system t
Motor Specifications • Pittman GM8724S017 • 19.5:1 internal gearing ratio • Encoder mounted directly to rotor increases accuracy of encoder (encoder is not geared down) • External transmission gives additional reduction ratio of 3:1 • Larger motor size needed to meet system specifications
Linear Approach • Linear design of controller • PD controller designed • SISO design tool used for testing
Nonlinear Approach • Nonlinear design of controller • Input of transfer functions from linear design • Motor feasibility, torque requirements, and tracking ability observed
Circuit Approach • Circuit design for sensors • Input- Logic gates obtain time difference between signals received by sensors • Output – 12-bit accuracy in pitch and yaw direction • 3 additional digital I/O for circuit/controller communication
Circuit Diagram • Key Issues • DC OpAmps • Flip Flops
Software Development • Software Algorithms have several levels • Binary to Decimal Conversion • Gives us magnitude of time difference, and sign of difference • Angle Calculation Algorithm • Takes these 2 inputs, along with estimated distance, and returns the desired change in angle to the controller • Controller
Software Development • Binary Conversion • Takes in 12 Digital I/O inputs and treats them as a binary number, then converts this number to an integer
Software Development y Transmitter (point X,Y) • Current Angle Calculation Algorithm • d2 = sqrt(X2 + Y2) • d1 = sqrt((X – c)2 + Y2) • dm = sqrt((X – c)2 + Y2) - sqrt(X2 + Y2) • 4 Lookup Tables were generated using a range of Y’s, and a range of dm’s • One each for positive pan, negative pan, positive tilt, and negative tilt x d1 d2 dm = d1 – d2 θ Sensor 1 Sensor 2 e c
Software Development (X,Y) • This only calculates the angle we are currently at • We also need to calculate the angle we want to be at, given the Range estimate Y • θ = atan2(Y , e + 0.5 * c) Sensor 1 Sensor 2 θ e c
Software Development • Now that we know our current angle, and desired angle, we subtract the two, and send this value to the controller.
Linear Results • Simulation results • Step response of controller • Within 1% steady state error
Nonlinear Results • Simulation results • Motor torque • Motor tracking
Nonlinear Results • Simulation results • Motor feasibility
Friction ID Results • Pan • Coulomb • Pos: 0.13 • Neg: -0.13 • Viscous • Pos: .01 • Neg: -.0089
Final Results • Original specifications vs Final specifications • Tracking accuracy • Tracking accuracy with motion • Affect of friction compensation
Results Demo • System demo video • Demo
Design Evaluation • Problems encountered • Sensor functionality • Future Improvements • Improved integration of sensor and control system • Faster sensor algorithms • Addition of filters to improve motion of system
Conclusion • PD controller used • Accurate linear vs nonlinear results obtained • System is expandable for future improvements • Questions?