Download
1 / 29
290 likes | 497 Views
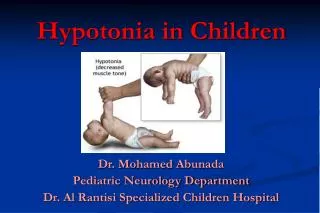
Active Monitoring and Alerting for Hypotonia of the Jaw. Shabab Mustafa and Jason Strack Group 31. Outline. Problem & Solution List of parts Design Testing Future work. Problem. Solution. Create a device to monitor the jaw position Alert the user when needed

E N D
Active Monitoring and Alerting for Hypotonia of the Jaw Shabab Mustafa and Jason Strack Group 31
Outline • Problem & Solution • List of parts • Design • Testing • Future work
Problem Solution Create a device to monitor the jaw position Alert the user when needed Close the jaw automatically • Jaw open for extended periods of time • Who suffers? • Stroke victims • Downs’ syndrome • Effects • Drooling • Embarrassing
Our Device Accelerometer placement Base device placement
Batteries Two LiFePO4 • 2.4Wh each • 3.2V • 750mAh • Rechargeable • Fairly safe • Non-toxic • Virtually incombustible • No memory effect • Expect 3 days of continued use
Accelerometers Two MMA7341Ls • Comes with circuit board • Three axes • Only using two axes each • 2.2–3.6V operating voltage • We operate at 3.53V • 1.65mW power consumption • Sensitive to ± 3 or ± 11g • We use ± 3g • Better sensitivity • Mounts to jaw and temple • One is stationary reference • One moves with jaw • Added silicone rubber
Microcontroller MSP430G2231 • 1.8-3.6V operating voltage • Operating at 3.56V • 0.66mW power consumption • 8 ADC inputs • Using 4 from accelerometer signals • Emits 0.5 second output
Regulators 7805 UA78M33KC VIN = 5.3V to 25V VOUT = 3.3V IOUT = 500mA • VIN = 5.5V to 20V • VOUT = 5V • IOUT = 1A
Transistor as a Switch 2N2222A • NPN • 400mW • VCE,max = 10V • BVEB0,max = 6V • Microcontroller to Timer
555-timer and Op-Amps LM555 LF347 Better than LM374 Quad op-amp 570mW VCC = ±18V Noise-cancelling and clipping • Timer IC • 5V Operation • Pmax = 1180mW • Signals for both audio and electric stimulation
Output and Casing • Board-mounted 3.5-mm jack and 3.5-mm headphones (32Ω Imp.) • Electrodes • Black box • Discrete • Hip-mounted • Easily accessible front-panel
Building an Oscillator • Initially built an AC oscillator • Periodic charging/discharging of capacitors • Needed DC, square wave • TENS Unit • Chose 555-timer
555 Monostable Timer (2) 1s interval 5s interval
Determining Jaw Open • ADC converts 0V to max voltage (3.53V) to values from 0-1023 • Accelerometer range is only 238 • Change in angle must be calculated • init_accel[i] and accel[i] get digital acceleration readings • diff[i] = init_accel[i] – accel[i] • i = 0 is accelerometer 1’s x-axis, 1 is Y1 axis, 2 is X2 axis, 3 is Y2 axis • angle = arcsin( ((diff[3]/((1-diff[2])/119)) – (diff[1] /((1-diff[0])/119)) )/119 ) • Microcontroller lacks necessary flash memory for math.h • However arcsin(x) can be approximated as x + x3/6 + 3x5/40 + 5x7/112 • Only accept ±60̊ change in x1-axis • if( (diff[0] > 103) || (diff[0] < -103) ) declare jaw closed • if( angle > 0.524 || angle < -0.524) angle > ±30̊ jaw is open
Timing Microcontroller Signal • Track time, reset if jaw closed time = wdtCounter / (float)WDT_FREQUENCY/1000; while ((wdtCounter – time) < 3000){ if( jawOpen() = 0 ) time = wdtCounter; } • If closed for 3 seconds send signal • Signal lasts one half second • After this resumes checking jaw
Accelerometer Testing • Measured x and y axes • Rotated both axes in circles • X-axis voltage 1.15-1.97V • Y-axis voltage 1.18-2.00V • Accelerometer 2 not working • Was working before demo • Started acting up around demo • Not working now, do not have picture
Microcontroller Testing • Insert angle values in code • Check with LED to test microcontroller • Next use actual accelerometers • Again use LEDs to test • Move accelerometers in various positions
Future Work • Reserve one channel of 3.5mm jack for electrodes • Mount jacks on side panel for easier part replacement • Headphones • Accelerometers • Sealing • Battery holder • Adjustable frequency • Separate timers • Use/manipulate a timer such that low when inactive • Circuit protection for electrodes • Thinner wire • 30 – 40 AWG
Future Work • Could add two 3-axis magnetic sensors • Would measure jaw for all head positions • Would add cost and complexity • Could use optical distance sensor instead • More simple, but also larger and more power consumption • Test electrical stimulation • Control output wave shape with microcontroller • Will reduce needed circuitry, reduce power, give cleaner output • Package everything to fit on ear • Easier to attach and remove device • Considerable improvement in being discreet