Download
1 / 4
40 likes | 128 Views
Use bluetooth for communication. 1. enable bluetooth in NXT and also enable visibility 2. configure setting in brickCC Wait about 30 seconds for searching. Note:

E N D
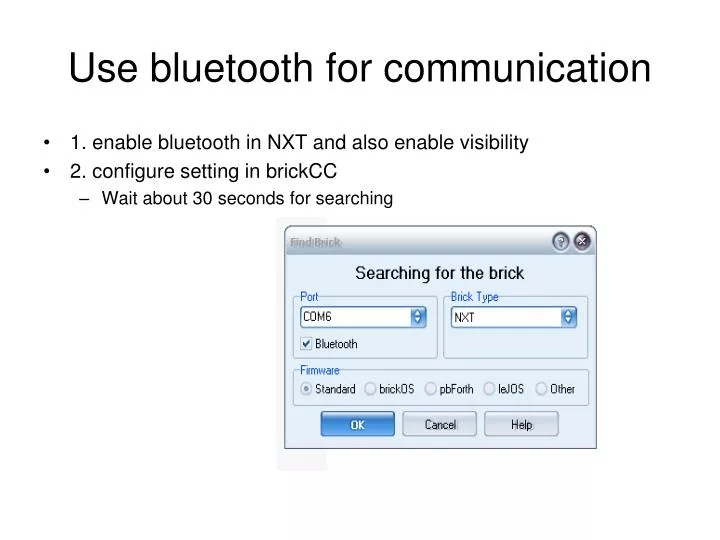
Use bluetooth for communication • 1. enable bluetooth in NXT and also enable visibility • 2. configure setting in brickCC • Wait about 30 seconds for searching
Note: 1. If you want to send commands or get the sensor values, you should not make connection in the robot to computer(in that case, the robot would be master and computer would be slave, and com port number would be 1,2,3). Instead you should make connection in your computer to robot(com number would be 0 in this case). 2. You do not need to use the bluetooth program in your computer, just use brickCC/RobotC. 3. If connection is correctly made, you’ll the com port 0 of NXT is occupied, and 1,2,3 ports is empty!
Drive Lego From PC • It is also possible to drive a Lego robot directly from a PC. This requires you to write a program in a language like C++. It is also possible to let such a program work together with an NXC program running in the NXT itself. Such a combination is very powerful. • Use machine learning algorithms available, call them in programs on your computer and send commands to lego • But this is very complicate • If you are interested in this way of programming your robot, best start with downloading the Fantom SDK and Open Source documents from the NXTreme section of Lego MindStorms web site. • http://mindstorms.lego.com/Overview/NXTreme.aspx
Basic NXT programming and controls (tutorial: Programming LEGO NXT Robots using NXC, RobotC is almost the same) (Derek: you can just teach them use this tutorial ) • 1.Motion control &Sensors( page 18) • 2.Tasks,subroutines(page 23) • 3.parallel Tasks(page 39) • 4.Communication function using blueBooth(Page 43)