Download
1 / 15
150 likes | 301 Views
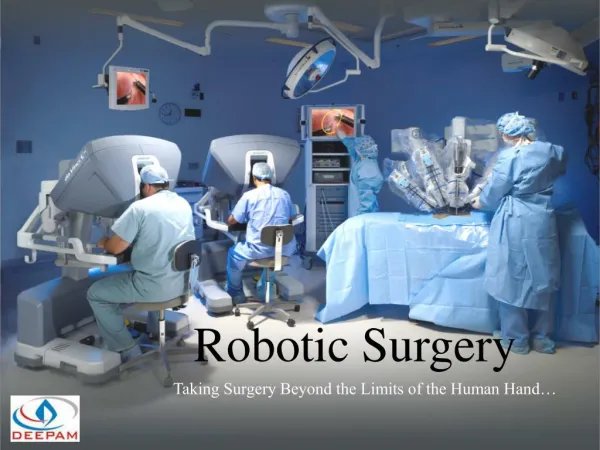
Robotic Arm for Minimally Invasive Surgery. Team: Brenton Nelson, Ashley Huth, Max Michalski, Sujan Bhaheetharan BME 200/300 October 14, 2005.

E N D
Robotic Arm for Minimally Invasive Surgery Team: Brenton Nelson, Ashley Huth, Max Michalski, Sujan Bhaheetharan BME 200/300 October 14, 2005
Client:Aimen Shaaban, M.D. Assistant Professor of SurgeryUniversity of Wisconsin Medical SchoolAdvisor:Willis Tompkins, Ph.D.ProfessorDept. of Biomedical EngineeringUniversity of Wisconsin
Overview • Current Minimally Invasive Surgery Techniques • Current Problems • Problem Specifications • Proposed Designs • Future Work • Questions
Background • da Vinci ii • Surgeon Console • EndoWrist Instruments • Seven degrees of motion • Mimics dexterity of hand and wrist • Motion scaling and tremor reduction • Laparoscopic grasper • 3-5mm in diameter shaft • Allows rotation about x- axis • Disposable or reusable • Variety of handles
Problems with Current Instruments Laparoscopic Grasper Da Vinci ii • Price • Excessive functions • Distance from Patient • Cumbersome • Limited patient access • Set up time/training • Possibility of being outdated • Limited sense of tension and pressure • Difficult to perform certain tasks • Uncomfortable • Takes endurance to use
Problem Specifications • Mimic wrist and hand movements • Simultaneously rotates graspers in all directions • Provide accurate tactile feedback • Simple operation by user • Fully operable by one hand • Maximum diameter for surgical shaft 5mm; goal 3mm.
Prototype 1: Trigger Control • “Pen-click” closed clamp • Trigger for simultaneous rotation and translation • Rotation and translation about x, y, and z axis
Prototype 1 (continued) • Pros • Single finger control for rotation • The • “Pen-click” clamps grasper without continuous applied pressure • Provide accurate feedback • Easy to use • Ergonomically beneficial • Cons • Not reusable • Expensive
Prototype 2: Double Trigger • Trigger Clamped • Trigger rotation in y, and z-axis • Rear spin knob for rotation in x-axis
Pros Simultaneously clamps and bends Ergonomic Reusable Tactile Feedback Prototype 2 (continued) • Cons • Expensive • Complex trigger mechanism, requires multiple digits
Joystick translates to grasper Simultaneous rotation in x, y, and z direction Guided tracks for smooth movements Trigger mechanism Prototype 3: Joystick Control
Pros Translates joystick motion to graspers Easy sewing motion Cons Lack of tactile feedback Lacks precision Thumb fatiguing Prototype 3 (continued)
Future Work • Finalize dimensions and materials • Build Final Prototype • Test Prototype