Download
1 / 13
130 likes | 183 Views
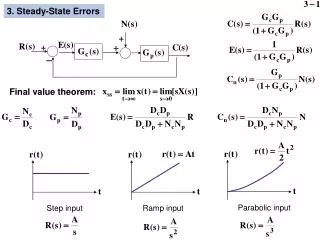
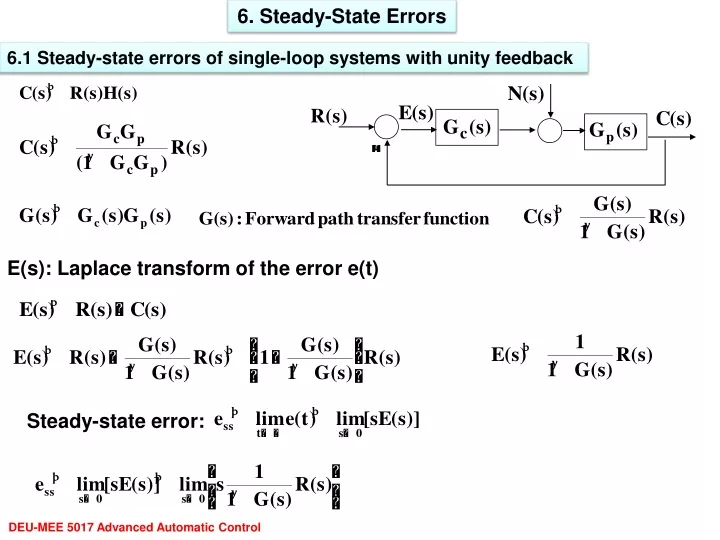
6. Steady - State Errors. R. (. s. ). Steady-state error :. 6.1 Steady - state errors of single - loop systems with unity feedback. E(s): Laplace transform of the error e(t). DEU-MEE 5017 Advanced Automatic Control. 6.2 System type :.

E N D
6. Steady-StateErrors R ( s ) Steady-state error: 6.1 Steady-stateerrors of single-loopsystemswithunityfeedback E(s): Laplace transform of the error e(t) DEU-MEE 5017 Advanced Automatic Control
6.2 Systemtype: ess depends on the characteristics of G(s). We can show that ess depends on the number of poles that G(s) has at s = 0. This number is known as system type, which explains the type of the control system. Example 6.1 : Determine the system type of the forward path transfer functions. System type: 1 System type: 2 System type: 0 System type: 1
R ( s ) Step Input 6.3(a) Step error : Step-errror constant System type: ess 0 1 0
R ( s ) Ramp input 6.3(b) Ramperror : Ramp-errror constant System type: ess 0 1 2 0
R ( s ) Parabolic input 6.3(c) Parabolicerror : System type: ess Parabolic-errror constant 0 1 2 3 0
R ( s ) Step Ramp Parabolic ess: Example 6.2: System type: 0 Test stability
R ( s ) Step Ramp Parabolic ess: Example 6.3 : System type: 1 I-control improves steady-state error.
R ( s ) Step Ramp Parabolic ess: Example 6.4 : System type: 1 D-control does not affect and improve steady-state error.
OV 6.4 The effect of PID control on the performanceparameters • P-action : As Kp increases, the steady-state error decreases, the overshoot increases, the settling time does not change, the rise time decreases. • I-action: When the integral control is added, the steady-state error eliminates, the overshoot increases, the settling time increases, the rise time decreases. • D-action: When the derivative control is added, the steady-state error does not change, the overshoot and settling time decreases, the rise time does not change.
R ( s ) Final value theorem 6.5. Otherparameters at steady-state Css: Steady state value of the ouput. CNss: Sensitivity.
R ( s ) Steady-state error: 6.6 Steady-stateerrors of single-loopsystemswithnonunityfeedback
(Example 7-5, Kuo:P-381) Consider a single-loopsystemwithnonunityfeedback. • Find the steady-stateerrorsfor step, ramp, andparabolicinputs. • Observe the result by Matlab/Simulink Example 6.5 :
R ( s ) • (Problem 7-7, Kuo:P-458) Considertheclosed-loopsystemwithnonunityfeedback. • Find K sothatthesteady-stateerrorforthe step input is % 2. • Model thesystembyMatlab/Simulinkandobserve the result . Example 6.6 : Answer: K=14.7