Download
1 / 23
250 likes | 481 Views
1 – OBJET DE LA CINÉMATIQUE La cinématique est la partie de la mécanique qui étudie : les mouvements sans tenir compte des forces qui les ont provoqués. On étudiera donc : Les vitesses Les trajectoires Les espaces parcourus Les accélérations. 1. 0. LES REFERENCES.

E N D
1 – OBJET DE LA CINÉMATIQUE La cinématique est la partie de la mécanique qui étudie : les mouvements sans tenir compte des forces qui les ont provoqués. On étudiera donc : Les vitesses Les trajectoires Les espaces parcourus Les accélérations
1 0 LES REFERENCES 01 LE SOLIDE DE RÉFÉRENCE Le mouvement d’un solide est défini par rapport à un autre solide pris comme référence. Ce dernier est donc appelé : SOLIDE DE RÉFÉRENCE Notation : le mouvement du cycliste 1 par rapport au sol 0 sera noté : Mvt 1/0
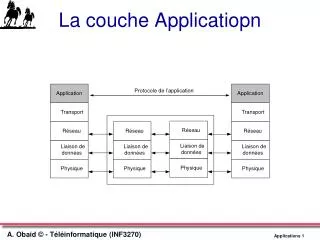
y z x LES REFERENCES LE REPÈRE DE TEMPS En mécanique classique, le temps est considéré comme absolu et uniforme : t t = 0 avant après L’unité de temps est la seconde LE SYSTEME DE RÉFÉRENCE Il se compose de 2 éléments Repère de temps Repère d'espace
Y1 Z1 Yo X1 Y2 Zo Xo Z X2 MOUVEMENT ABSOLU OU RELATIF Le mouvement est dit « ABSOLU » s’il est décrit par rapport à un système de référence absolu, c’est-à-dire un référentiel au repos absolu (pour nous : la terre). Le mouvement est dit « RELATIF » s’il est décrit par rapport à un système de référence relatif, c’est-à-dire un référentiel en mouvement. Référentiel relatif Référentiel relatif Référentiel absolu
A 2 1 B 0 C C' LES TRAJECTOIRES DÉFINITION : courbe définie par les positions successives d’un point appartenant à un solide en mouvement. NOTATION : la trajectoire du point A appartenant au solide 1 par rapport au solide 2 sera notée TA1/2 A' B' TA2/0 segment AA’ TB2/0 segment BB’ cercle centre B rayon BC TC1/2 point B TB1/2 cycloïde CC’ TC1/0
Lune Terre Autres exemples de trajectoires : Parabole Ellipse
MOUVEMENTDES SOLIDES Mouvement de translation Si la trajectoire de chaque point est une droite, on parle de Translation rectiligne
MOUVEMENT DES SOLIDES Si la trajectoire de chaque point est un cercle mais que le solide ne change pas d’orientation pendant le mouvement, on parle de : Translation circulaire
MOUVEMENT DES SOLIDES • Mouvement de rotation Lorsque la trajectoire de chaque point est un cercle et que le solide change d’orientation pendant le mouvement.
MOUVEMENT DES SOLIDES A tracez les trajectoires TA4/0, TB2/0, TC1/0 B E D C Axe du piston Translation rectiligne complétez le tableau . Centre D Rotation Centre E Rotation Translation circulaire
MOUVEMENT DES SOLIDES Mouvement plan Lorsque la trajectoire est une courbe quelconque mais dans le plan :
MOUVEMENT DES SOLIDES Exemple : Translationrectiligne Le mouvement du piston rouge est : Le mouvement de la biellette bleue est : Rotation Mouvement plan Le mouvement de la bielle verte est :
2 3 4 5 1 D G B E F A H 0 APPLICATION : BRIDE HYDRAULIQUE Définissez les mouvements entre solides : Définissez les trajectoires et tracez-les Rotation TG1/0 Centre B Cercle centre B rayon BG Mouvement plan TC1/0 Cercle centre B rayon BC Rotation Centre A Mouvement plan TD3/0 Cercle centre A rayon AD Rotation Centre E Axe du vérin TF4/5 Axe du vérin Translation rectiligne TH5/0 Cercle centre E rayon EH
t e MOUVEMENT RECTILIGNE UNIFORME 1- DÉFINITION La trajectoire est une droite La vitesse est constante L’accélération est nulle 2- LOIS DU MOUVEMENT a(t) = 0 Accélération en m.s-2 vo: vitesse initiale vo v(t) = v0 Vitesse en m.s-1 e(t) = v0 x t e / t = tan = v la pente de la droite est proportionnelle à la vitesse v peut être <0 Espace parcouru en m e(t) = e0 (v0 x t) e0 Si un espace e0 a déjà été parcouru au temps t=0 : e0 si v<0 : e=0 quand v0t=e0
D C B E A e(km) 20 12 t(mn) 40 v(t) t 40 APPLICATION diagramme e(t) simplifié du déplacement d’un véhicule : le diagramme v(t) : 20 10 72 12 5 0 0 0 5 8 96 26.7 0 5 0 0 15 20 80 22.2 60 40 16.7 40
MOUVEMENT RECTILIGNE UNIFORMEMENT VARIE 2- LOIS DU MOUVEMENT 1- DÉFINITION a0 La trajectoire est une droite La vitesse est variable L’accélération est constante a(t) = a0 a peut être < 0 v(t) = v0 (a0 x t) v0 v0 a < 0 v(t) = a0 x t e(t) = e0 + (v0xt) + (½a0 x t2) si a < 0 e(t) =½ a0 x t2
APPLICATION : CHARIOT DE DÉCOUPE PLASMA Le chariot de cette machine atteint la vitesse de 10cm.s-1 en 2 secondes (phase 1). Il évolue ensuite à vitesse constante pendant 8 secondes (phase 2), puis s’arrête sur 12,5cm (phase 3). Les accélérations et décélérations sont constantes. Déterminez les équations de mouvement pour les 3 phases, puis tracez les courbes correspondantes 0 5 a = v²/2e = 100/25 a = v / t = 10 / 2 10 5t -4 10t + 10 2.5 t² -4t+V0 90 10 -2t²+10t + 90 2.5 t = -v0 / a = 10 / 4 102.5
MOUVEMENT CIRCULAIRE UNIFORME 1- DÉFINITION La trajectoire est un cercle La vitesse est constante L’accélération est nulle 2- LOIS DU MOUVEMENT Rad.s-2 Accélération angulaire Rad.s-1 Vitesse angulaire rad Angle parcouru (t) = 0 (t) = 0 x t = 0
B1 eB B0 O R MOUVEMENT CIRCULAIRE UNIFORME 3- VITESSE DU POINT Pendant la rotation, le point B passe de B0 à B1. Il parcourt la distance eB. Sa vitesse linéaire (en m.s-1 ) est : £VB 0 x R vB = L’espace qu’il parcourt (en m) est : 0 x R x t eB = R est la distance du point à l’axe de rotation 4- Fréquence de rotation La fréquence est l’expression d’un nombre d’évènements par unité de temps. Exemple : la rotation d’une broche de perceuse exprimée en tours par minute. Relation entre vitesse angulaire / vitesse linéaire / fréquence de rotation : N R /30 N /30 = v =
APPLICATION 39 52 22 13 4 1.77 60 60 Plateaux 52 dents (ø210) et 39 dents (ø160) Pignons 13/14/15/16/17/18/19/20/21/22 Fréquence de pédalage : 1 tour par seconde Roues ø700 Manivelles longueur 175 60/30= 6.28 60/30= 6.28 60x1.77= 106.2 60x4= 240 240/30= 25.13 106.2/30= 11.12 11.12x0.35= 3.89 25.13x0.35= 8.79 8.79x3600/1000= 31.66 3.89x3600/1000= 14 6.28x0.08= 0.5 6.28x0.105= 0.65 6.28x0.175= 1.1 6.28x0.175= 1.1
Le cycliste roule à vitesse constante pendant 30 minutes Développementmini Développementmaxi 14/2= 7 31.66/2= 15.83 15830/0.7= 7198 7000/0.7= 3183 7198/4= 1800 3183/1.77= 1800
VG1/0 1 0 G VECTEURS VITESSE et ACCÉLÉRATION TRANSLATION RECTILIGNE La vitesse instantanée d’un point peut être modélisée par un vecteur : VG1/0 Caractéristiques de ce vecteur : - point d’application : - direction : - sens : - module G aG1/0 celle de latranslation celui du mouvement v Remarque : tous les points du solide en translation ont des vecteurs vitesse identiques. L’accélération du point peut aussi être modélisée par un vecteur Caractéristiques de ce vecteur : - point d’application : - direction : - sens : - module G aG1/0 celle de la translation du mouvt si a>0, sinon sens inverse a Remarque : tous les points du solide en translation ont des vecteurs accélération identiques.
0 1 A VECTEURS VITESSE et ACCÉLÉRATION ROTATION La vitesse instantanée d’un point peut être modélisée par un vecteur : VA1/0 Caractéristiques de ce vecteur : - point d’application : - direction : - sens : - module A tangente en A à la trajectoire VA1/0 de la rotation v = x R Remarque : les vitesses sont proportionnelles à la distance point / centre de rotation. aTA1/0 Les accélérations : il en existe deux : une normale aN et une tangentielle aT. aT n’existe pas si la rotation est uniforme. Elle peut être modélisée par un vecteur : Caractéristiques de ce vecteur : - point d’application : - direction : - sens : - module A tangente en A à la trajectoire de la rotation si a>0 sinon inverse a