Download
1 / 33
330 likes | 649 Views
RTLinux Lab – Introduction Cpre 558. Anil anil@iastate.edu. Contents. Real-Time Operating System (RTOS) Vs. General Purpose OS (GPOS) Can Linux provide real-time guarantees? Commercial RTOSs RTLinux Vs. Linux: Architectural comparison RTLinux Vs. Linux: Code perspective

E N D
RTLinux Lab – IntroductionCpre 558 Anil anil@iastate.edu CprE 458/558: Real-Time Systems (G. Manimaran)
Contents • Real-Time Operating System (RTOS) Vs. General Purpose OS (GPOS) • Can Linux provide real-time guarantees? • Commercial RTOSs • RTLinux Vs. Linux: Architectural comparison • RTLinux Vs. Linux: Code perspective • Get the RTLinux setup ready • Things to Issue and Handling the hard disk • Lab #1: Detailed discussion CprE 458/558: Real-Time Systems (G. Manimaran)
RTOS Vs. GPOS • RTOS • needs deterministic timing behavior • Works under worst case assumptions • GPOS • high throughput and fairness • Optimizes for the average case • Hence, the design objectives of the OSs are different CprE 458/558: Real-Time Systems (G. Manimaran)
Can Linux provide real-time guarantees?-- No!! • Linux • non-preemptible kernel • A system call might take long time to complete • Coarse timer resolution • Tasks can be released only with 10ms precision • Virtual memory • Introduces unpredictable amount of delays • Variable priority • Each task is assigned a priority which varies over the time; this is to achieve fairness CprE 458/558: Real-Time Systems (G. Manimaran)
Can Linux provide real-time guarantees?-- No!! (contd..) • Linux • Linux will batch several operations for efficient use of H/W delaying all tasks • Linux also reorders requests from multiple processes for H/W efficiency • Linux does not preempt low priority task in a system call, instead queues the high priority task • Linux makes high priority tasks to wait for low priority tasks to release resources Therefore, Linux cannot provide real-time guarantees CprE 458/558: Real-Time Systems (G. Manimaran)
Commercial RTOS • RTLinux – Monolithic kernel with loadable modules • QNX – Microkernel approach • VxWorks – Monolithic kernel • LynxOS – Microkernel • ARTS, Spring, KURT, RTAI, etc…. CprE 458/558: Real-Time Systems (G. Manimaran)
RTLinux: Overview • Open source Linux project • Supports x86, PowerPC, Alpha • Available as a patch to the regular Linux kernel • Provides an RT API for developers • Runs Linux kernel as lowest priority process CprE 458/558: Real-Time Systems (G. Manimaran)
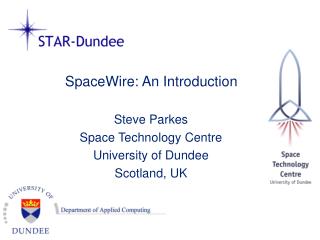
Linux Kernel User Processes System libraries Linux kernel Device drivers I/O Hardware Interrupts Hardware CprE 458/558: Real-Time Systems (G. Manimaran)
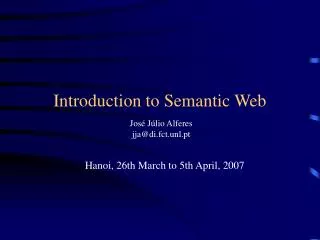
RTLinux Kernel Linux is executed in the background User Processes Real Time Tasks System libraries Linux kernel Device drivers I/O Software Interrupts Direct h/w access RTLinux Plug-in RT-Scheduler I/O Hardware Interrupts Hardware CprE 458/558: Real-Time Systems (G. Manimaran)
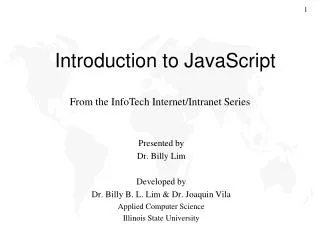
Linux Kernel: code perspective THE controller User Process Kernel Loadable Modules Module M2 service (system call) M1 M2 M2 Linux Monolithic kernel core M3 M4 RAM DISK CprE 458/558: Real-Time Systems (G. Manimaran)
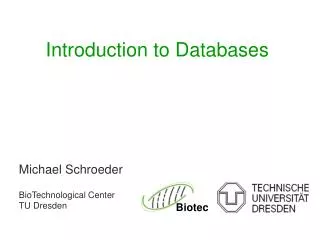
RTLinux Kernel: code perspective THE controller RT Load command RT core Kernel Loadable Modules Load RTcore RTM2 RTM3 Linux Monolithic kernel core M1 M2 RT-Core Module M3 RAM DISK CprE 458/558: Real-Time Systems (G. Manimaran)
Getting RTLinux ready • Configure and compile a fresh Linux kernel (2.4.29) • Download the kernel from http://www.kernel.org/pub/linux/kernel/v2.4/linux-2.4.29.tar.gz • Patch the RTLinux to the Linux kernel • Recompile the kernel and reboot the system into the new kernel • Configure the RTLinux kernel and compile it CprE 458/558: Real-Time Systems (G. Manimaran)
So, How do we run a RT-application program ? • Step 1: Write the RT-application program as a kernel module • (You are still in Linux) • Step 2: Compile the module and check for errors • (You are still in Linux) • Step 3: Load the RT-Core (or RT Scheduler, etc..) and the RT-application program module • (After this we will be in RTLinux) • Step 4: Now you are in RTLinux!!!! CprE 458/558: Real-Time Systems (G. Manimaran)
Homework • Submission 1: • Give a ten line write-up comparing RTLinux with Linux with at least five differences along with the references. • Submission 2: • Give a ten line write-up comparing RTLinux with two other commercial RTOSs with at least five differences for each of them along with the references. CprE 458/558: Real-Time Systems (G. Manimaran)
Lab Policies • Six assignments in total • First three assignments are mandatory • One of the last three assignments is mandatory • You will be working with a removable hard disk which can be issued from CSG CprE 458/558: Real-Time Systems (G. Manimaran)
Things to Issue • Issue the following from the CSG • Hard disk (one per group) • Key (one per group) • RHEL – WS3 installation DVD (one per group) • You need to download the lab01 tar file (lab01.tgz) from the course website. • The RTLinux lab is in Coover - 1331C CprE 458/558: Real-Time Systems (G. Manimaran)
Handling the hard disk (1) • Shutdown the PC • After the power is off, unlock the existing hard disk and take it out • Insert the hard disk given to you and lock it • Restart the comp • Follow the manual you have downloaded from the course website CprE 458/558: Real-Time Systems (G. Manimaran)
Handling the hard disk (2) • After you are done with the lab: • Shutdown the PC • After the power is off, unlock the hard disk and remove it • Insert the original hard disk and lock it • Leave the Lab CprE 458/558: Real-Time Systems (G. Manimaran)
RTLinux Lab# 1Cpre 558 Anil anil@iastate.edu CprE 458/558: Real-Time Systems (G. Manimaran)
Lab 1: Objectives • Part 1: • Getting the RTLinux lab setup ready • Part 2: • Run a few simple hello-world modules CprE 458/558: Real-Time Systems (G. Manimaran)
Part 1 • Install the RHEL-WS3 using the DVD given to you • Go for the auto-partitioning option • Rest everything is straightforward • Configure and compile fresh Linux kernel (2.4.29) • Patch the RTLinux to the Linux kernel • Recompile the kernel and reboot the system into the new kernel • Load RT-modules • Instructions are provided in the Lab manual CprE 458/558: Real-Time Systems (G. Manimaran)
Part 2 • Boot into the RTLinux kernel compiled in part-1 • The objectives of the part 2 are: • Understanding a simple RTLinux kernel module • With one thread (hello-1) and two threads (hello-2) • Printing from a RTLinux module • rtl_printf (hello-3) • Using rtf_put (RT-FIFO) (hello-4) CprE 458/558: Real-Time Systems (G. Manimaran)
A kernel module Vs. Program • All RT-Tasks are kernel modules. Therefore, we write kernel modules in this lab. • A user program runs in user space and the kernel module runs in the kernel space • A user program starts running at its “main” function • A kernel module starts running at the “init_module” function and exits via “cleanup_module” function • Therefore, for a kernel module “init_module” and ‘cleanup_module” are as necessary as “main” is necessary for a C program CprE 458/558: Real-Time Systems (G. Manimaran)
A typical kernel module Init_module() { ……. Perform your module initiation stuff etc.. } Cleanup_module() { ……. Perform cleanup stuff like destroying the threads, freeing memory, etc.. } CprE 458/558: Real-Time Systems (G. Manimaran)
Hello world Module • Go through the hello world module • Realize the importance of init_module and cleanup_module • Notice the way the thread is created and how it is made periodic • Understand the “pthread_make_periodic” and “pthread_wait” and other interfacing functions CprE 458/558: Real-Time Systems (G. Manimaran)
A typical RTLinux module This function tells the scheduler that I am a periodic task with period “p” Init_module() { For each thread: Choose the priority function //pthread_set_priority(..); Assign the “task_function” to the thread Create the thread //pthread_create(.., task_function,..);} Task_function() { Pthread_make_periodic_np(p); while(1) { Pthread_wait_np(); //perform the task function //for this instance } } Cleanup_module() { ……. Delete the thread //pthread_delete_np(..); } This function tells the scheduler that I am done for this instance and schedule me after “p” units of time CprE 458/558: Real-Time Systems (G. Manimaran)
Hello World 2 • This module creates two threads using a nice “thread_struct” structure to make the initialization easy and compact. • Once again go through the interfacing funcitons • This time put more “rtl_printf” statements and open “/var/log/messages” file to find your output CprE 458/558: Real-Time Systems (G. Manimaran)
RTL_PRINTF: how does it work? Might overflow!! printk Rtl_printf Printk buffer Kernel ring buffer Log file Might overflow!! console syslodg CprE 458/558: Real-Time Systems (G. Manimaran)
Other ways of printing: RTL-FIFO • RTLinux FIFO provides communication mechanisms between RTL threads and Linux task. • A linux process creates the RTL-FIFO buffer which the RTL threads access and write and read from them CprE 458/558: Real-Time Systems (G. Manimaran)
RTL-FIFO • Creating and destroying FIFOS: • Using functions: rtf_create and rtf_destroy • These functions are called from linux process: open(), read(), write(); • Accessing FIFOs from RTL threads • using functions: rtf_put and rtf_get CprE 458/558: Real-Time Systems (G. Manimaran)
Using RTL_FIFO Linux Task: my_readtask RT Task: my_put task rtf_create() open() rtf_put() Time read() rtf_destroy() RTL FIFO CprE 458/558: Real-Time Systems (G. Manimaran)
Submissions • Submission 1: • Submit a five line write-up explaining the working of the two RTL interfacing functions including: • Pthread_make_periodic_np • Pthread_wait_np • Rtf_create,rtf_destroy, rtf_put, rtf_get • Submission 2: • Submit a five line write-up giving at least five differences between a kernel module and a user program. CprE 458/558: Real-Time Systems (G. Manimaran)
Thank You!! CprE 458/558: Real-Time Systems (G. Manimaran)