Download
1 / 82
860 likes | 1.1k Views
Chapter 2. Discrete-Time Signals and Systems. Main Contents. Important types of signals and their operations Linear and shift-invariant system Easier to analyze and implement The convolution and difference equation representations

E N D
Main Contents • Important types of signals and their operations • Linear and shift-invariant system • Easier to analyze and implement • The convolution and difference equation representations • Representations and implementation of signal and systems using MATLAB Engineering college, Linyi Normal University
Some concepts Digital signal processing: It is a transformation for signals that are discrete in both amplitude and time. Engineering college, Linyi Normal University
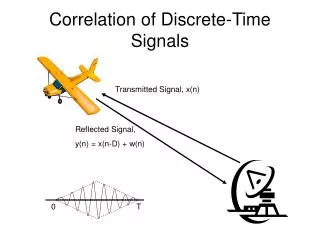
A: Discrete-time signals: sequences • Analog and discrete signals • analog signal • t represents any physical quantity, time in sec. • Discrete signal: discrete-time signal • n is integer valued, represents discrete instances in times, and T is the sampled period (its reciprocal is the sampling frequency) Engineering college, Linyi Normal University
In Matlab, a finite-duration sequence representation requires two vectors, and each for x and n. • Example: • Question: whether or not an arbitrary infinite-duration sequence can be represented in MATLAB? Engineering college, Linyi Normal University
A.1. Types of sequences 1. Unit sample (Impulse) sequence Engineering college, Linyi Normal University
Representation in matlab • A: n=[n1:n2]; • x = zeros(1,n2-n1+1); x(n0-n1+1)=1; • B: n=[n1:n2]; x = [(n-n0)==0]; stem(n,x); Engineering college, Linyi Normal University
2. Unit step sequence A: n=[n1:n2]; x=zeros(1,n2-n1+1); x(n0-n1+1:end)=1; B: n=[n1:n2]; x=[(n-n0)>=0]; Engineering college, Linyi Normal University
3. Real-valued exponential sequence For Example: n=[0:10]; x=(0.9).^n; stem(n,x) Engineering college, Linyi Normal University
4. Complex-valued exponential sequence Attenuation: 衰减因子 frequency in radians:ω0 For Example: n=[0:10]; x=exp((2+3j)*n); Engineering college, Linyi Normal University
5. Sinusoidal sequence Phase in radians:θ For Example: n=[0:10]; x=3*cos(0.1*pi*n+pi/3) +2*sin(0.5*pi*n) Engineering college, Linyi Normal University
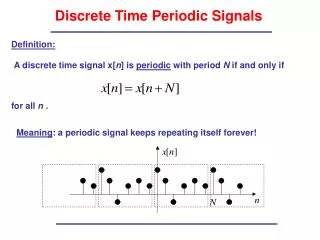
6. Periodic sequence • A sequence x(n) is periodic if x(n)=x(n+N) • The smallest integer N is called the fundamental period • Representation with Engineering college, Linyi Normal University
A.2: Operations on sequence • 1. Signal addition • Sample-by-sample addition • {x1(n)}+{x2(n)}={x1(n)+x2(n)} Function [y,n]=sigadd(x1,n1,x2,n2) n=min(min(n1),min(n2)): max(max(n1),max(n2)); y1=zeros(1,length(n)); y2=y1; y1(find((n>=min(n1)) & (n<=max(n1))==1))=x1; y2(find((n>=min(n2)) & (n<=max(n2))==1))=x2; Y=y1 + y2; Engineering college, Linyi Normal University
FIND Find indices of nonzero elements. I = FIND(EXPR) evaluates the logical expression EXPR and returns the indices of those elements of the resulting matrix that are equal to the logical TRUE state. For example, I = FIND(A > 100) returns the indices of those elements of A that are greater than 100. If EXPR is a matrix, FIND returns linear indices. Engineering college, Linyi Normal University
2. Signal multiplication • Sample-by-sample multiplication • Dot multiplication • {x1(n)}.{x2(n)}={x1(n) x2(n)} Function [y,n]=sigmult(x1,n1,x2,n2) n=min(min(n1),min(n2)) : max(max(n1),max(n2)); y1=zeros(1,length(n)); y2=y1; y1(find((n>=min(n1)) & (n<=max(n1))==1))=x1; y2(find((n>=min(n2)) & (n<=max(n2))==1))=x2; Y=y1 .* y2; Engineering college, Linyi Normal University
3. Scaling • a{x(n)}={ax(n)} 4. Shifting • y(n)={x(n-k)} • m=n-k; y=x; e.g. x(n)=[3,4,5,6,5,4,3] x(n-2)[3,4,5,6,5,4,3] Engineering college, Linyi Normal University
5. folding • y(n)={x(-n)} • y=fliplr(x); n=-fliplr(n); 6. Signal energy 7. Signal power Engineering college, Linyi Normal University
A.3. Some useful results • Unit sample synthesis • Any arbitrary sequence can be synthesized as a weighted sum of delayed and scaled unit sample sequence. Engineering college, Linyi Normal University
Even and odd synthesis • Even (symmetric): xe(-n)=xe(n) • Odd (antisymmetric): xo(-n)=-xo(n) • Any arbitrary real-valued sequence can be decomposed into its even and odd component: x(n)=xe(n)+ xo(n) Engineering college, Linyi Normal University
Function [xe, x0, m] = evenodd(x,n) If any(imag(x) ~= 0) error(‘x is not a real sequence’); End m = -fliplr(n); m1 = min([m,n]); m2 = max([m,n]); m=m1:m2; nm = n(1)-m(1); n1 = 1:length(n); x1 = zeros(1, length(m)); x1(n1+nm) = x; x = x1; xe = 0.5 * (x + flipflr(x)); xo = 0.5*(x - fliplr(x)); Engineering college, Linyi Normal University
B. discrete-time Fourier transform (DTFT) • B.1 Definition DTFT: IDTFT: Existence Condition: x(n) is absolutely summable. Engineering college, Linyi Normal University
F[.] transforms a discrete signal x(n) into a complex-valued continuous function X of real variable w, called a digital frequency, which is measured in radians. • Time domain -- Frequency domain • Discrete -- Continuous • Real valued -- Complex-valued • Summation -- integral • The range of w: • The integral range of w: Engineering college, Linyi Normal University
B.2 The properties of DTFT 1. periodicity The DTFT is periodic in ωwith period 2 2. Symmetry For real-valued x(n), is conjugate symmetric. The results are: Engineering college, Linyi Normal University
In other word, the real part of Fourier transform is an even function, and the imaginary part is an odd function if the sequence is real (or the magnitude is even and the phase is odd) Engineering college, Linyi Normal University
3. Linearity 4. Time shifting and Frequency shifting 5. Folding :folding in the time domain corresponds to the folding in the frequency domain. Engineering college, Linyi Normal University
6. Convolution If y(n)=x(n)*h(n), then 7. Multiplication (modulation or windowing theorem) If y(n)=x(n)w(n), then Engineering college, Linyi Normal University
C: The z-transform • The discrete-time Fourier transform approach for representing discrete signals using complex exponential sequence. • Advantages for LTI system • It describes systems in the frequency domain using the frequency response function H. • The computation of the sinusoidal steady-state response is great facilitated by the use of H. • Response to any arbitrary absolutely summable sequence x(n) can easily be computed in the frequency domain by multiplying the transform X and the frequency response H. Engineering college, Linyi Normal University
Shortcoming to the DTFT • 1. There are many useful signals in practice, such as u(n), nu(n), for which the DTFT does not exist. • 2. The transient response of a system due to initial conditions or due to changing inputs cannot be computed using the DTFT approach. Engineering college, Linyi Normal University
Example Engineering college, Linyi Normal University
C.1 Definition of z-transform • Depending on r, x(n)r-n will or will not have a DTFT. • Definition of the z-transform • Region of convergence (ROC) The set of z values for which X(z) exists is called the region of convergence (ROC) and is given by Engineering college, Linyi Normal University
The ROC is very important, different sequences may have the same expression, but the ROC differs. Two sequences will be same if and only if their expression and ROC of z-transform is same. • Example Engineering college, Linyi Normal University
Zeros and Poles The z-transform usually is a rational function which is expressed with the ratio of two polynomial as below: Zero: the roots of the numerator polynomial –“×” Pole: the roots of the denominator polynomial –“o” Engineering college, Linyi Normal University
ROC of some typical sequences 1. finite-duration sequences Engineering college, Linyi Normal University
2. positive-time sequence 3. Negative-time sequence Engineering college, Linyi Normal University
4. two-sided sequence Otherwise, the ROC is a null space, and X(z) does not exist. Engineering college, Linyi Normal University
Comments: 1. The complex variable z is called the complex frequency given by , where |z| is the attenuation and w is the real frequency; 2. Since the ROC is defined in terms of the magnitude |z|, the shape of the ROC is an open ring. Note that Rx- may be equal to 0 and/or Rx+ could possibly be infinity; 3. If Rx+ <Rx-, then the ROC is a null space and the ZT does not exist; Engineering college, Linyi Normal University
4. The function |z|=1 (or ) is a circle of unit radius in the z-plane and is called the unit circle. If the ROC contains the unit circle, then we can evaluate X(z) on the unit circle. Therefore the discrete-time Fourier transform X() may be viewed as a special case of the z-transform X(z). Engineering college, Linyi Normal University
C.2 properties of the z-transform • 1. Linearity • 2. Sample shifting • 3. Frequency shifting • 4. Folding Engineering college, Linyi Normal University
5. Complex conjugation • 6. Differentiation in the z-domain • 7. Multiplication • 8. Convolution Multiplication by a ramp Engineering college, Linyi Normal University
C.3 Inversion of the z-transform • Definition • Method • Inspection • Partial fraction expansion (√) • Power series expansion Note : The most practical approach is to use the partial fraction expansion method. It makes use of the z-transform table. The z-transform, however, must be a rational function. This requirement is generally satisfied in digital signal processing. Engineering college, Linyi Normal University
1. Inspection method • Use what you know! • Ex1: then if (always pay attention to the ROC !) Engineering college, Linyi Normal University
2. Partial fraction expansion (1) M<N ,and X(z) has single pole, then Engineering college, Linyi Normal University
(2) If X(z) has a repeated root, and others is single root, then Engineering college, Linyi Normal University
Example Engineering college, Linyi Normal University
(3) , then Engineering college, Linyi Normal University
3. Power series expansion Ideal: Express X(z) as a power series: the polynomial coefficient is x(n). • Ex. 1: By Talor series • Long division for rational function Engineering college, Linyi Normal University
C.4 DTFT and z-transform DTFT exists ROC contains unit circle Engineering college, Linyi Normal University
Definition A discrete system is defined mathematically as a trans-formation or operator that maps an input sequence with values x[n] into an output sequence with values y[n]. This can be denoted as • y(n) = T [ x(n)] • x(n): excitation, input signal • y(n): response, output signal X[n] y[n] T{x[n]} D. Discrete Systems • Definition A discrete system is defined mathematically as a trans-formation or operator that maps an input sequence with values x[n] into an output sequence with values y[n]. This can be denoted as • y(n) = T [ x(n)] • x(n): excitation, input signal • y(n): response, output signal X[n] y[n] T{x[n]} Engineering college, Linyi Normal University
Linear systems A discrete system T[.] is a linear operator if and only if Two properties: additivity, scaling Engineering college, Linyi Normal University
Example Solution Engineering college, Linyi Normal University