Download
1 / 16
160 likes | 172 Views
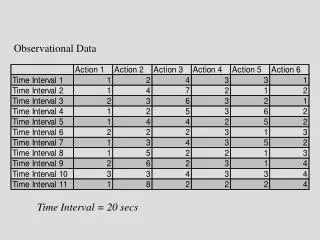
This presentation discusses advanced data assimilation strategies in modern observational networks for real-time, high-resolution applications. It covers topics such as measurement and model errors, assimilation criteria, atmosphere/ocean prediction, and implementing a comprehensive data assimilation system.

E N D
Advanced Data Assimilation Strategies in Modern Observational Networks For Real-Time, High Resolution Applications AMS-Albuquerque-2001 Hernan G. Arango Rutgers University, New Brunswick, NJ Pierre J.F. Lermusiaux Harvard University Scott M. Glenn Rutgers University
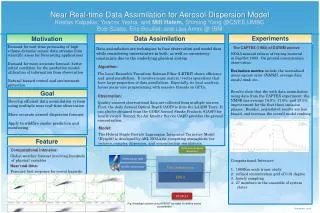
What is Data Assimilation?? Measurement Model Measurement Errors Dynamical model Model Errors Data Assimilation Criterion Melded Estimate agrees with measurement and dynamical models within respective uncertainties Atmosphere/Ocean Prediction A Melded Estimate of Data and Dynamics
Overall Goal: Determine, Develop and validate a comprehensive data assimilation system for the estimation of real oceanic fields Specific Objectives Improve the understanding of oceanic variability/uncertainty Implement a versatile and portable data assimilation system Obtain a reliable estimate of the uncertainty of forecasts Address and capture model nonlinearities Adaptive filtering, sampling and parameter estimation Assimilation in real time Efficient numerical implementations
Constraints Dimension of the complete uncertainty model too high Limited, costly ocean data sets Approach Basic properties and heuristic characteristics of geophysical measurements and models Focus on error subspace (errors of largest variance)
ESSE Smoothing via Statistical Approximation Minimum Error Variance Within Error Subspace (Data-Forecast Melding) Field Nonlinear Forecast (Estimate of nature) Field and Error Initialization Error Eigendecomposition Nonlinear Forecast (via Ensemble/Monte-Carlo Forecasts) Main ESSE Components
+ ESSE Flow Diagram ESSE Smoothing via Statistical Approximation ^ DY0/N Field Initialization Central Forecast ^ ^ Y0 Ycf(-) Ymp(-) Shooting Sample Probability Density Measurement Model OA via ESSE Measurement Model Select Best Forecast Options/ Assumptions Mean SVDp Performance/ Analysis Modules Perturbations Minimum Error Variance Within Error Subspace (Sequential processing of Observations) Adaptive Error Subspace Learning + Scalable Parallel Ensemble Forecast Error Subspace Initialization Normalization Peripherals Analysis Modules Convergence Criterion Continue/Stop Iteration Breeding DE0/N + DP0/N - - + Most Probable Forecast + Synoptic Obs A Posteriori Residules dr (+) Historical, Synoptic, Future in Situ/Remote Field/Error Observations d0R0 + - - Data Residuals Measurement Error Covariance ^ d-CY(-) Ensemble Mean + + ^ eq{Yj(-)} Gridded Residules ^ Y(-) + - ^ ^ j=1 Y(+) Y(+) Y1 Yj Yq ^ - Y1 Yj Yq + 0 + - E(-) P(-) ^ - + 0 + + - +/- ^ E0 P0 j=q 0 uj(o,Ip) with physical constraints Continuous Time Model Errors Q(t) Key Ea(+) Pa(+) E(+) P(+) Field Operation Assumption
LEO meters State Vector 241 x 111 x 25 Z: u: v: u: v: T: S: 26,751 26,510 26,751 662,750 666,000 668,775 668,775 2,746,201 - -
Observational Network July 2000 CTD, Glider, REMUS, Thermistor strings CODAR Towed CTD
U component V component 4 3 2 1 0 -1 -2 -3 -4 39:42N 39:30N 39:42N 39:30N 39:18N 39:18N 74:24 74:12 74W 73:48 74:24 74:12 74W 73:48 0 5 10 15 20 25 Eigenvector Numbers 0 5 10 15 20 25 Eigenvector Numbers CODAR Normalized Dominant Error Covariance x10-2
Navy Products NOAA & Rutgers Global Atmospheric Forecasts NOGAPS NCEP I.C. B.C. I.C. B.C. Atmosphere- Ocean Nowcasting/ Forecasting System Local Atmospheric Forecasts COAMPS 27 km 6 hours RAMS 4 km 30 min Atm. Forcing Atm. Forcing Ocean Models ROMS PBL SBL BBL WBL MODAS (POM) I.C. B.C. Waves WAM Wave Models
Validation at Thermistor String CS2 RMS=0.6865 RMS=0.7972 RMS=1.4863 Observations Model Estimate RMS=3.7447 RMS=1.2795
A-Line Temperature Cross Section CS2 CS4
Model Observation Comparison at Thermistor String CS2 Low Wind Forcing High Wind Forcing Real Data Model Estimate
Conclusions: The ESSE approach is a nonlinear, robust and efficient data assimilation scheme for the realistic estimation of oceanic fields and their associated error and variability covariances. As expected, in coastal regions, the dominant error covariance is non-isotropic with larger along-shore scales. In shallow coastal regions, the success of ocean data assimilation is affected by the accuracy of atmospheric forecasts, specially during high wind events.
Real-time Thermistors ROMS/COAMPS ROMS/RAMS MODAS COAMPS
For more information contact: Hernan G. Arango Rutgers University, New Brunswick, NJ 732-932-6555 x266 arango@imcs.rutgers.edu http://marine.rutgers.edu/cool http://marine.rutgers.edu/po/models/roms.html