Download
1 / 15
160 likes | 369 Views
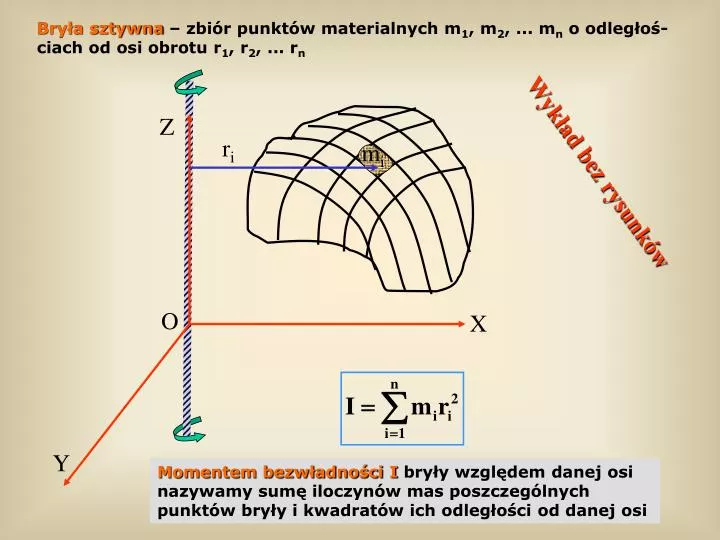
Bryła sztywna – zbiór punktów materialnych m 1 , m 2 , ... m n o odległoś- ciach od osi obrotu r 1 , r 2 , ... r n. Z. r i. m i. Wykład bez rysunków. O. X. Y. Momentem bezwładności I bryły względem danej osi nazywamy sumę iloczynów mas poszczególnych

E N D
Bryła sztywna – zbiór punktów materialnych m1, m2, ... mn o odległoś- ciach od osi obrotu r1, r2, ... rn Z ri mi Wykład bez rysunków O X Y Momentem bezwładności I bryły względem danej osi nazywamy sumę iloczynów mas poszczególnych punktów bryły i kwadratów ich odległości od danej osi
Dla bryły o ciągłym rozkładzie masy gdy liczba n części zmierza do Moment bezwładności Moment bezwładności – sposób rozmieszczenia masy bryły wokół osi obrotu; odgrywa ważną rolę w ruchu obrotowym bryły
I I0 Przykład kuli: S O ° ° a a I0 I Twierdzenie Steinera Twierdzenie Steinera pozwala obliczyć moment bezwładności względem dowolnej osi, nie przechodzącej przez środek masy bryły Moment bezwładności bryły I względem dowolnej osi jest równy sumie momentu bezwładności I0 względem osi równoległej przechodzącej przez środek masy bryły oraz iloczynu masy tej bryły i kwadratu odległości a obu osi I = I0 + ma2 S – środek masy bryły
ri Fi Zasady dynamiki ruchu obrotowego Bryła sztywna – zbiór punktów materialnych m1, m2, ... mn o odległościach od osi obrotu r1, r2, ... rn Ruch bryły wywołują siły F1, F2, ... Fn, działające stycznie do okręgów Wypadkowy moment sił działających na bryłę: Prawo Newtona Prędkość kątowa i przyspieszenie kątowe są stałe dla wszystkich punktów materialnych Druga zasada dynamiki ruchu obrotowego: moment siły działającej na bryłę sztywną jest równy iloczynowi momentu bezwładności I tej bryły i jej przyspieszenia M=I
zapis wektorowy L = rmv = mr2 L = mr2 dL M = dt Moment pędu Moment pędu (kręt) Lpunktu materialnego o masie m i wektorze wodzącymr, poruszającego się z prędkością v względem osi obrotu odległej o r od tego punktu Iloczyn wektorowy L=rxmv r v to sin =1 Wektor momentu pędu jest skierowany zgodnie z osią obrotu Moment pędu bryły jest sumą momentów pędu wszystkich jej punktów: II zasada dynamiki ruchu obrotowego: pochodna momentu pędu L bryły względem czasu t jest równa momentowi siły M działającej na tę bryłę
M = I = 0 = const M = 0 i - wielkości wektorowe: I zasada dynamiki ruchu obrotowego Bryła sztywna nie poddana działaniu momentu siły pozostaje nieruchoma lub wykonuje ruch obrotowy jednostajny III zasada dynamiki ruchu obrotowego Jeżeli na bryłę A działa bryła B pewnym momentem siły MAB, to bryła B działa na A momentem MBA równym co do wartości, lecz przeciwnie skierowanym MAB = – MBA
Zasady zachowania w mechanice Zasada zachowania energii: Całkowita energia układu odosobnionego jest wielkością stałą W układzie odosobnionym mogą zachodzić tylko przemiany jednych form energii w inne Układ odosobniony: układ na który nie działają żadne siły zewnętrzne
Zasady zachowania w mechanice Zasada zachowania pędu: Jeżeli wypadkowa sił zewnętrznych działających na układ punktów materialnych jest równa zeru, to pęd całkowity tego układu jest stały Przykład: pęd układu (łódka + człowiek) pozostaje stały (równy 0)
Zasady zachowania w mechanice Zasada zachowania krętu: Jeżeli moment wypadkowy sił zewnętrznych działających na układ równa się zeru, to kręt całkowity tego układu jest stały L = I = const Kręt układu (człowiek + hantle) pozostaje stały -zmniejszenie momentu bezwładności przyspiesza obrót
Mechanika klasyczna lub newtonowska – mechanika wyprowadzona z zasad dynamiki Newtona; poprawnie opisuje zjawiska, jeżeli prędkości ciał są bardzo małe w porównaniu z c 300 000 km/s Mechanika relatywistyczna lub einsteinowska – mechanika oparta na szczególnej teorii względności; prędkości ciał są porównywalne z c 300 000 km/s Mechanika kwantowa nie opisuje trajektorii mikrocząsteczek, a jedynie prawdopodobieństwo znalezienia się cząstki w różnych punktach przestrzeni R–nie Newtona R–nie Schrödingera Trajektoria r=r(t) Funkcja falowa Mechanika kwantowa Mechanika relatywistyczna Mechanika klasyczna Prawa mechaniki klasycznej są szczególnymi przypadkami praw mechaniki relatywistycznej
Układy inercjalne Każdy ruch musi być opisany względem pewnego dowolnie obranego układu odniesienia Układ odniesienia, w którym ciało nie poddane działaniu sił pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym nazywamy układem inercjalnym Układy inercjalne: Ziemia, układ związany z gwiazdami Każdy układ poruszający się względem układu inercjalnego ruchem jednostajnym i prostoliniowym jest też układem inercjalnym v’= v – v0 v0 i v są stałe v’ też jest stała v’ i v–prędkości ciała w układzie współrz. O’ i O; v0–prędkość układu O’ Istnieje nieskończenie wiele inercjalnych układów odniesienia i żaden z nich nie jest wyróżniony Zasada względności: We wszystkich układach inercjalnych prawa fizyki są jednakowe
Układy nieinercjalne Układ O’ porusza się wzdłuż osi X ruchem dowolnym względem układu O x(t) – współ. punktu P w układzie O x’(t) – współ. punktu P w układzie O’ x0(t) – odległość początku układu O’ od początku układu O y = y’ z = z’ Zał.: punkt znajduje się pod działaniem innych ciał materialnych ( siła), więc porusza się ruchem przyspieszonym (F=ma) Przyspieszenie w układzie O’ nie jest równe przyspieszeniu w układzie O a’= a, jeśli a0 = 0 (układ inercjalny) a0 – przyspieszenie unoszenia Jeśli a0 0, to układ O’ jest nieinercjalny
Transformacja Galileusza Rozważmy dwa układy inercjalne O i O’ poruszające się względem siebie wzdłuż osi x z prędkością u Współrzędne zjawiska zachodzącego w punkcie P w układzie O wynoszą: x, y, z, i t a w układzie O’ odpowiednio x’, y’, z’ oraz t’ (x, y, z, t) – współrzędne czasowo-przestrzenne Związki umożliwiające przejście z jednego układu odniesienia do drugiego układu odniesienia: O O’ O’ O x = x’ + ut’ x’ = x – ut y = y’ y’ = y z = z’ z’ = z t = t’ t’ = t To jest transformacja Galileusza Dodatkowe ukryte założenie: czas płynie jednakowo w obydwu układach odniesienia Z transformacji Galileusza korzystamy przy opisie zjawisk mechaniki klasycznej
O’ O O O’ x’ = (x − ut) x = (x’ + ut’) y’ = y y = y’ z’ = z z = z’ t’ = t = Transformacja Lorentza Doświadczenie Michelsona i Morleya: w próżni światło zawsze porusza się z prędkością c, niezależnie od ruchu źródła lub obserwatora Postulat szczególnej teorii względności Einsteina: prędkość światła nie zależy od układu odniesienia Zamiast transformacji Galileusza transformacja Lorentza: O’ O O O’ x’ = x − ut x = x’ + ut’ y’ = y y = y’ z’ = z z = z’ t’ = t t = t’ Transformacja Galileusza Transformacja Lorentza czynnik Lorentza u<<c =1 • Różnice pomiędzy obu transformacjami: • w transformacji Lorentzawspółrzędna x mnożona przez • czynnik Lorentza • czas płynie niejednakowo w obu układach odniesienia O i O’