Download
1 / 22
220 likes | 365 Views
Design and Control of Interconnected Systems. Raffaello D’Andrea Cornell University. Examples. Power generation and distribution Vehicle platoons Satellite formation flight Paper processing Adaptive optics MEMS data storage Optical switching “Smart” structures

E N D
Design and Control of Interconnected Systems Raffaello D’Andrea Cornell University
Examples • Power generation and distribution • Vehicle platoons • Satellite formation flight • Paper processing • Adaptive optics • MEMS data storage • Optical switching • “Smart” structures • and so on... Common thread: • Distributed sensing and actuation capabilities • Highly structured interconnection topology
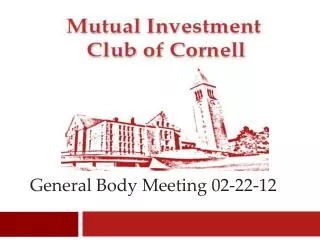
~ ~ vi wi General Problem Class CONTROLLER PLANT yi ui wi vi Gi Gi ~ di zi yi ui Stability, performance, robustness Requirements:
Simplest case: Homogeneous Systems Basic building block, one spatial dimension
Results for linear and piece-wise linear systems Theorem: If the following semidefinite program has a solution: where N and the are fixed, and only a function of the basic building block, then all interconnected systems are well-posed, stable, and D’Andrea ’98, D’Andrea & Dullerud ‘03
Basic building block: control design Design controller that has the same structure as the plant:
Properties of design • Controller has the same structure as the plant • Finite dimensional, convex optimization problem • Optimization problem size is independent of the number of • units
Theorem: the interconnected system is well-posed, stable, and if the following coupledsemidefinite programs have a solution: if the subsystems are not interconnected: Langbort, Chandra, & D’Andrea ’03 Chandra, Langbort, & D’Andrea ‘03
Theorem: the interconnected system is well-posed, stable, and if the following coupledsemidefinite programs have a solution: if the subsystems are not interconnected: Langbort, Chandra, & D’Andrea ’03 Chandra, Langbort, & D’Andrea ‘03 When working with linearized dynamics, results generalize tocontrol system design
Summary • Semidefinite programming a powerful tool for controldesign and analysis of interconnected systems • Generalization of powerful results for single systems:linear, piece-wise linear, nonlinear • Leads to distributed semidefinite programs, whosestructure is captured by interconnection topology