Download
1 / 60
640 likes | 1.17k Views
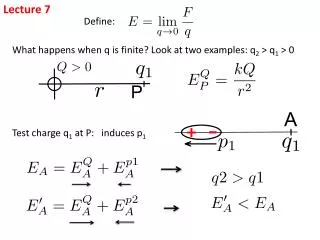
Lecture 7. Poles and Zeros Stability. Poles and Zeros. Transfer Function Models. General Representation wh ere z i are the zeros p i are the poles n ≥ m to have a physically realizable system

E N D
Lecture 7 Poles and Zeros Stability
Transfer Function Models General Representation where zi are the zeros pi are the poles n≥ m to have a physically realizable system • The dynamic behavior of a transfer function model can be characterized by the numerical value of its poles and zeros
Transfer Function Models • Transfer Function can be expressed in gain/time constant form, i.e. factoring out bm and an • Pole–Zero cancellation happens when the numerator and denominator terms cancels each other
Pole The factor/s of the denominator of the transfer function It is the value wherein the transfer function approaches infinity as the value of s approaches the pole
Example 1 • Pole of order 1 or simple pole at s = 0 • Pole of order 2 at s = 5 and pole of order 3 at s = – 7
Zero The factor/s of the numerator of the transfer function It is the value wherein the transfer function approaches 0 as the value of s approaches the zero
Complex Plane Plot Graphical representation of a rational transfer function in the complex plane which helps to convey certain properties of the system x–axis is real part y–axis is imaginary part
Pole–Zero Plot • Zero s = – 2 o in plot • Pole s = ±0.5i x in plot
Effects of Pole Location • Left Half Plane (LHP) results in a stable system, i.e. stable response • Right Half Plane (RHP) results in unstable system, i.e. unstable step response Imaginary axis x x Real axis x Imaginary axis x x Real axis x
Effects of Pole Location Faster response when pole is farther from imaginary axis Complex pole results to oscillatory response p = a + bj where j = √– 1 Imaginary axis x → complex poles x Real axis x
Effects of Pole Location • More oscillatory transient response when pole is farther from real axis • Pole at the origin, i.e. 1/s term in Transfer Function Model, results in an integrating element/process
Effects of Zero Location Zeros have no effect on system stability Zero in Right Half Plane (RHP) results in inverse response to a step change in the input Imaginary axis inverse response x Real axis y t
Effects of Zero Location Zero in Left Half Plane (LHP) results in overshoot during a step response
Stability • Most industrial processes are stable without feedback control and are said to be open–loop stable or self–regulating • An open–loop stable process will return to the original steady state after a transient disturbance, i.e. one that is not sustained, occurs • By contrast there are a few processes, such as exothermic chemical reactors, that can be open-loop unstable
Stability Definition An unconstrained linear system is said to be stable if the output response is bounded for all bounded inputs or BIBO stability. Otherwise it is said to be unstable. Applicability • Any linear control system comprised of linear elements • Nonlinear systems operating near the point of linearization
Stability • Asymptotically stability is when the variables of the stable control system always decrease from their initial value and do not show permanent oscillations • Permanent oscillations occur when a pole has a real part exactly equal to zero (in the continuous time case) or a modulus equal to one (in the discrete time case) • Marginally stability is when a simply stable system response neither decays nor grows over time, and has no oscillations • System transfer function has non–repeated poles at complex plane origin, i.e. their real and complex component is zero in the continuous time case
D G*d Ysp Y’sp E P U V Y Gv Km Gc Gp Ym Gm + + – + Closed Loop System Transfer Function
Closed Loop System Characteristic Equation of Closed Loop System Is the denominator of the transfer function Can be simplified to 1 + GOL where GOL is the open loop transfer function Used to solve for poles by equation to zero, i.e. 1 + GOL = 0
Stability for Closed Loop System General Stability Criterion The feedback control system is stable if and only if all roots of the characteristic equation are negative or have negative real parts. Otherwise, the system is unstable. Assumptions • Set–point changes rather than disturbance changes were considered • Closed–loop transfer function was a ratio of polynomials • Poles are all distinct
Stability Region in Complex Plane A system is stable if the poles of the transfer function lie strictly in the closed left half of the complex plane, i.e. the real part of all the poles is less than zero
Closed Loop Response Stable System
Closed Loop Response Unstable System
Example 1 Determine whether system is stable or not given Solution: Solving for 1 + GOL Equating 1 + GOL = 0
Example 1 Solving for s Inference on system System is stable since real part of pole/s is negative Behavior is oscillatory due to the presence of imaginary term
Example 2 Determine whether system is stable or not given 1 + GOL = s + 0.2Kc – 1 Solution: Equating 1 + GOL = 0 s + 0.2Kc – 1 = 0 s = 1 – 0.2Kc For system to be stable s should be less than 0, i.e. Kc > 5
Example 3 Determine whether system is stable or not given Solution: Solving for 1 + GOL Equating 1 + GOL = 0
Example 3 Solving for s For system to be stable, s should be less than 0, i.e. 40(Kc + 1) > 0 or Kc > – 1
Stability Test Direct Substitution Method Routh Stability Criterion Root Locus Diagram Bode Stability Criterion Nyquist Stability Criterion
Direct Substitution Method • Imaginary axis divides the complex plane into stable and unstable regions for the roots of characteristic equation • On the imaginary axis, the real part of s is zero, and thus we can write s = jw. Substituting s = jw into the characteristic equation allows us to find a stability limit such as the maximum value of Kc • As the gain Kc is increased, the roots of the characteristic equation cross the imaginary axis when Kc = Kcm
Direct Substitution Method Methodology s = jw is substituted in the characteristic equation Kc is equated to Kcm Both the real part and imaginary part is equated to 0 and value of w and Kcm is computed Stability region is determined for Kc
Example 4 Determine whether system is stable or not given 10s3 + 17s2 + 8s + 1+ Kc = 0 Solution: Substituting s = jw and Kc = Kcm in the characteristic equation – 10jw3 – 17w2 + 8jw + 1+ Kcm = 0 or (1+ Kcm – 17w2) + j (8w – 10w3)= 0
Example 4 Equating both real and imaginary part to zero 1+ Kcm – 17w2 = 0 8w – 10w3= 0 Solving w from 8w – 10w3= 0 results to w = 0 → Kcm = – 1 w = ±0.894 →Kcm = 12.6 Region of stability would be – 1 < Kc < 12.6
Example 5 Determine whether system is stable or not given Solution: Solving for 1 + GOL = 0
Example 5 s3 + 6s2 + 11s + 6(1+ Kc) = 0 Substituting s = jw and Kc = Kcm in the characteristic equation – jw3 – 6w2 + 11jw + 6(1+ Kcm) = 0 or (6+ 6Kcm – 6w2) + j (11w – w3)= 0
Example 5 Equating both real and imaginary part to zero 6+ 6Kcm – 6w2 = 0 11w – w3= 0 Solving w from 11w – w3= 0 results to w = 0 → Kcm = – 1 w = ±3.32 →Kcm = 10 Region of stability would be – 1 < Kc < 10
Routh Stability Criterion Developed by E J Routh in 1905 a.k.a. Routh–Hurwitz Stability Criterion Routh Test Purely algebraic method Used to establish stability in single input single output (SISO) linear time invariant control system
Routh Stability Criterion • Applied to systems with characteristic equation that has a polynomial form. Hence, it can not be used to systems with time delays or transport lag, i.e. e –qsterm • For system with e –qsterm, Padé approximation is done on the time delay term/s
Routh Stability Criterion • It is necessary (but not sufficient) that all the coefficients of the characteristic equation, i.e. an, an – 1, . . . , a1 and a0, be positive else the system is unstable. Hence, no need to perform the Routh Test
Example 6 Determine the stability of system that has characteristic equation s4 + 5s3 + 3s2 + 1= 0 Solution: Since the s term is missing, its coefficient is zero Thus, the system is unstable. Recall that a necessary condition for stability is that all of the coefficients in the characteristic equation must be positive.
Routh Array Generation Given a polynomial of the form: ansn+ an–1sn–1 + ● ● ● + a1s+ a0 = 0 Row 1 an ● ● ● an–2 an–4 an–1 2 ● ● ● an–3 an–5 3 b1 ● ● ● b2 b3 c1 ● ● ● 4 c2 ● ● ● ● ● ● z1 n + 1
Theorems on Routh Test Theorem 1 A necessary and sufficient condition for all the roots of the characteristic equation to have a negative real parts (or stable system) is that all the elements of the first column in the Routh array be positive and nonzero Theorem 2 If some of the elements in the first column are negative, the number of roots with a positive real part, i.e. in the right hand plane, is equal to the number of sign changes in the first column
Theorems on Routh Test Theorem 3 If one pair of the roots is on the imaginary axis, equidistant from the origin, and all other roots are in the left half plane, all the elements of the nth row will vanish and none of the elements preceding row will vanish. The location of the pair of imaginary roots can be found by solving the equation Cs2 + D = 0 where C and D are the elements of the (n–1)throw read left to right, respectively
Example 7 Determine the stability of system that has characteristic equation s4 + 3s3 + 5s2 + 4s + 2= 0 Solution: Row 1 1 5 2 3 2 4 3 11/3 2 26/11 4 System is stable since all terms in the 1st column is positive (Theorem 1) 5 2
Example 8 Determine the stability of system that has characteristic equation s6 + s5 +4s4 + 3s3 + 2s2 + 4s + 2= 0 Solution: Row 1 1 4 2 2 1 2 4 3 3 1 2 –2 5 4 2 • System is unstable since not all terms in the 1st column is positive • 2 roots are in the right half plane due to 2 sign changes 5 –12/5 2 6 –74/12 7 2
Example 9 Determine value of Kc to have a stable system Solution: Solving for 1 + GOL
Example 9 Characteristic equation s3 + 6s2 + 11s + 6(1 + Kc)= 0 Row For system to be stable, all terms in the 1st column should be greater than zero (Theorem 1) 10 – Kc > 0 → Kc < 10 6 (1 + Kc) > 0 → Kc > –1 Region of stability –1 < Kc < 10 1 1 11 6 2 6(1 + Kc) 3 10 – Kc 6(1 + Kc) 4
Example 9 When Kc = 10, system is on the verge of instability. The Routh array becomes Row According to Theorem 3, the (n–1)th row is the coefficient C and D used in solving the imaginary roots. 6s2 + 66 = 0 s = ±√11 1 1 11 6 2 66 3 0 66 4