Download

1 / 47
470 likes | 557 Views
This seminar delves into Fusion Calculus, Synchronized Hyperedge Replacement, and Logic Programming, exploring their relationships, strengths, and weaknesses. From theoretical backgrounds to practical implications, new hybrid models are devised and analyzed.

E N D
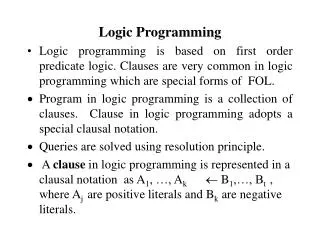
Dagstuhl Seminar #05081, 20-25 February 2005 Mapping Fusion and Synchronized Hyperedge Replacement into Logic Programming Ivan Lanese Dipartimento di Informatica Università di Pisa joint work with Ugo Montanari To be published on a special issue of Theory and Practice of Logic Programming
Roadmap • Lot of background • Fusion Calculus • Synchronized Hyperedge Replacement • Logic programming • From Fusion Calculus to Hoare SHR • From Hoare SHR to logic programming • Conclusions
Motivations • Many models proposed for global computing systems • Each model has its strengths and its weaknesses • Comparing different models • To understand the relationships among them • To devise new (hybrid) models • Cannot analyze all the models, naturally…
Roadmap • Lot of background • Fusion Calculus • Synchronized Hyperedge Replacement • Logic programming • From Fusion Calculus to Hoare SHR • From Hoare SHR to logic programming • Conclusions
Fusion Calculus • Process calculus that is an evolution of -calculus • Simpler and more symmetric but also more expressive • Introduces fusions of names
Syntax for Fusion Calculus • Agents: S::=i i.Pi P::=0 | S | P1|P2 | (x)P | rec X. P | X Processes are agents up to a standard structural congruence
Synchronized Hyperedge Replacement • Follows the approach of graph transformation • (Hyper)edges are systems connected through common nodes • Productions describe the evolution of single edges • Local effect, easy to implement • Productions are synchronized via constraintson nodes • Global constraint solving algorithm to find allowed transitions • Productions applied indipendently • Allows to define complex transformations
Hyperedge Replacement Systems • A production describes how the hyperedge L is transformed into the graph R L R H H 3 3 4 4 2 2 1 1
L R H 3 3 4 4 2 2 1 1 1 1 2 2 3 3 R’ L’ Hyperedge Replacement Systems • A production describes how the hyperedge L is transformed into the graph R H Many concurrent rewritings are allowed
Synchronizing productions • Productions associate actions to nodes • A transition is allowed iff thesynchronization constraints imposed on actions are satisfied • Many synchronization models are possible (Hoare, Milner, ...)
a a a a B1 A1 3 3 B2 A2 An example: Hoare SHR • Hoare synchronization: all the edges must perform the same action • Milner synchronization:pairs of edges do complementary actions
We use name mobility • Actions carry tuples of references to nodes (new or already existent) • References associated to synchronized actions are matched and corresponding nodes are merged a<x> a<x> a<y> B1 A1 a<y> (x) (y) x=y B2 A2 SHR with mobility
Logic programming Very quickly… • Syntax • Semantics
Roadmap • Lot of background • Fusion Calculus • Synchronized Hyperedge Replacement • Logic programming • From Fusion Calculus to Hoare SHR • From Hoare SHR to logic programming • Conclusions
From Fusion to HSHR • We separate the topological structure (graph) from the behaviour (productions) • We give a visual representation to processes • Processes translated into graphs • Sequential processes become hyperedges • Names become structures called amoeboids • Our approach deals only with closed processes
Translation by example • We take agents in standard form • restrictions with inside parallel composition of sequential agents • We transform it into a linear agent + substitution
Translation by example • We translate the process into a graph • Each linear agent becomes an edge labelled with a copy of the agent with standard names • Q(x1,y1,z1) becomes an edge labelled by Q(x1,x2,x3) attached to x1,y1,z1 • σ transformed into amoeboids • Each amoeboid connects a group of names merged by σ
x1x2x3.R(x4,x5) Translation by example x x1 z1 Q(x1,x2,x3) y1 z x2 x3 y y2 z2 z3 u2 u1 w1 u3 x1x2x3.S(x4,x5) u w2 w
Dynamics • We have actions for input and output prefixes • Productions for process edges • Correspond to executions of prefixes of normalized linear agents • Prefixes modeled by corresponding SHR actions • RHS contains the translation of the resulting sequential process • Fusions implemented by connecting nodes via amoeboids
x2 x3 x1x2x3.R(x4,x5) y2 R(x1,x2) u2 u1 A sample production x2 x3 y2 u2 u1 out2x2y2
in x out y P Q y x What is an amoeboid? • Amoeboids must allow two complementary actions on the interface and create new amoeboids connecting corresponding names • Connected amoeboids are merged P Q =
Implementing amoeboids in HSHR • Amoeboids implemented as networks of edges with a particular structure • composed essentially by edges that act as routers • each internal node is shared by two edges • some technical conditions • Satisfy the desired properties but… • interleaving must be imposed from the outside • produce some garbage (disconnected from the system)
Correspondence theorem • Reductions of fusion processes correspond to (interleaving) HSHR transitions • up to garbage • up to equivalence of amoeboids that does not change the behaviour • The correspondence can be extended to computations
x1x2x3.R(x4,x5) Translation by example x Q(x1,x2,x3) z y out x2 y2 x1x2x3.S(x4,x5) u in z2 w1 w
Translation by example x Q(x1,x2,x3) z y R(x1,x2) S(x1,x2) u w
Summary : Fusion Calculus vs HSHR FusionHoare SHR Closed process Graph Sequential process Hyperedge Name Amoeboid Prefix Action Prefix execution Production Reduction Transition
Roadmap • Lot of background • Fusion Calculus • Synchronized Hyperedge Replacement • Logic programming • From Fusion Calculus to Hoare SHR • From Hoare SHR to logic programming • Conclusions
From Hoare SHR to logic programming • Useful for implementation purposes • Logic programming as goal rewriting engine • Very similar syntax (with the textual representation for HSHR) • Logic programming allows for many execution strategies and data structures we need some restrictions • limited function nesting • synchronized execution • We define Synchronized Logic Programming (SLP)
Synchronized Logic Programming • A transactional version of logic programming (in the zero-safe nets style) • Safe states are goals without function symbols (goal-graphs) • Transactions are sequences of SLD steps • During a transaction each atom can be rewritten at most once • Transactions begin and end in safe states • Transactions are called big-steps • A computation is a sequence of big-steps
Synchronized clauses • Clauses with syntactic restrictions • bodies are goal-graphs • heads are A(t1,…,tn) where ti is either a variable or a single function symbol applied to variables
HSHR vs logic programming • Graphs translated to goal-graphs • edges modeled by predicates applied to the attachment nodes • Productions are synchronized clauses • Transitions are matched by big-steps • Actions are implemented by function symbols • the constraint that all function symbols have to be removed corresponds to the condition for Hoare synchronization • names are the arguments of the function symbol • we choose the first one to represent the new name for the node where the interaction is performed (needed since substitutions are idempotent) • fusions performed by unification
Correspondence theorem • Correspondence between HSHR transitions and big-steps • An injective (at each step) substitution keeps track of the correspondence between HSHR nodes and logic programming variables
y y C C x z C x An example (simpler than Fusion…) C(x,y)←C(x,z),C(z,y) r <w> y y C(r(x,w),r(y,w))←S(y,w) C S (w) x x r <w>
S S S C C C x C S C C C C C C Dynamics
S S S C C C x C S C C C C C C Dynamics
Summary : HSHR vs SLP Hoare SHR SLP Graph Goal Hyperedge Atom Node Variable Parallel comp. AND comp. Action Function sym. Production Clause Transition Big-step
Roadmap • Lot of background • Fusion Calculus • Synchronized Hyperedge Replacement • Logic programming • From Fusion Calculus to Hoare SHR • From Hoare SHR to logic programming • Conclusions
Conclusions • Many relations among the three models • similar underlying structure (e.g. parallel composition) • name generations ability • fusions • Distinctive features • Fusion: same structure for system and elementary actions, interleaving semantics, Milner synchronization, restriction • HSHR: distributed parallel computations, Hoare synchronization, synchronous execution • SLP: Hoare synchronization, asynchronous execution engine
Future work • Analyzing different name-handling mechanisms • In π calculus bound names are guarenteed distinct • Useful for analyzing protocols (nonces, key generation) • Hybrid models • Different synchronizations for Fusion or logic programming • Process calculi with unification (of terms) • Logic programming with restriction • Logic programming for implementation purposes • For HSHR systems • For Fusion Calculus
End of talk Thanks Questions?
w z A textual notation for graphs Ring Example x,y,w,z C(x,w) | C(w,y) | C (y,z) | C(z,x)
Transitions as judgements • Transitions G1 ,,I G2 : (A x N* ) (x, a , y) if (x) = (a , y) is the set of new names that are used in synchronization = {z | x. (x) = (a , y), z , z set(y)} I contains new internal names
Computations 1 2 n 0 G0 1 G1 … n Gn Transitions as judgements • Productions x1,…,xn L(x1,…,xn) x1,…,xn , , IG Names can be merged (and new names can be added) Identity productions are always available • Transitions are generated from the productions by applying the transition rules for the chosen synchronization model
e <> y y C C x z e <> C x Textual representation for productions (x,ε,<>)(y,ε,<>) x, y C(x,y) x, y, z .C(x,z) | C(z,y) r <w> y y C S (w) x x r <w> , (x,r,<w>)(y,r,<w>) x, y x, y S(w,y) C(x,y)
Structural congruence Process: agent up to the following laws: • | and + are associative, commutative and with 0 as unit • -conversion • (x)0 = 0, (x)(y)P=(y)(x) P • P|(x)Q=(x)(P|Q) if x not free in P • rec X.P=P[rec X.P/X]