Download
1 / 4
40 likes | 118 Views
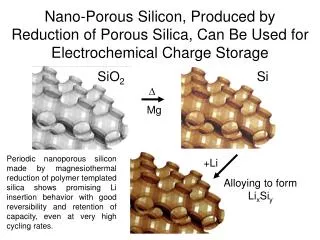
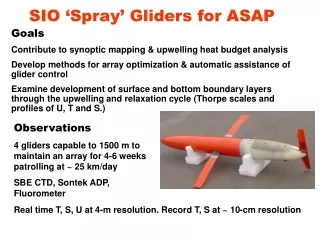
SIO Contributions for ASAP 2006. Field work: We are preparing 4 Spray gliders that will each carry: a Sea Bird CTD (much better than last time); a 750 kHz ADCP (25-30 m range shear to be integrated and referenced by depth-average current); and

E N D
SIO Contributions for ASAP 2006 Field work: We are preparing 4 Spray gliders that will each carry: a Sea Bird CTD (much better than last time); a 750 kHz ADCP (25-30 m range shear to be integrated and referenced by depth-average current); and a fluorometer or optical backscatter sensor (comments requested) Vehicle control:We propose to control our own gliders to achieve the observational objectives formulated by the ASAP team according to the 3 step procedure: establish relative mapping accuracies needed to meet all our objectives (including dynamical analysis and forecast sensitivity); using a lexicon of simple elements (lines, ovals, etc.) and objective mapping, design an ideal array; and control gliders to approximate this ideal. For Sprays we propose to do the last step.
Field Procedures SIO plans to deploy 4 gliders in mid-July to assist with model spin-up. If the array does not extend too far north, this can be done with a single day trip on the Shana Rae We do not plan to recover or re-deploy during August although this could be an emergency response to really strong currents We will recover all gliders at the end of August We propose to maintain a web display of all gliders and the velocities they see primarily for operational decision making. We could add real-time analyses from model now-casts Questions: a. What will the extent of the array be? b. Is there a need to meet physically for operational decision making at Monterey?
Vehicle Control The SIO approach to control will emphasize control in the face of large perturbations at the expense of automation. We have developed an efficient search algorithm to find fast trajectories through strong currents We will test proposed steering instructions to balance loss of mapping skill from getting off ideal track and from moving too slowly along that track. Steering instructions will be implemented as mini-algorithms that the glider can apply as it learns the depth-average current from the previous cycle
Virtual Pilot Experiment In recent Navy operations we have demonstrated the ability to relay profile and velocity data through email Data quality has been high and the need for automatic quality control is limited to flagging spikes affected by near-surface bubbles or very infrequent particles in the conductivity sensor Bio-fouling tests are underway off Point Conception which is nearly equally product as Monterey Bay Need instructions on: a. Who decides what data is transmitted in the VPE? b. Does anyone add noise to test QC procedures at models?