Download
1 / 25
250 likes | 398 Views
CSCE 212 Chapter 5 The Processor: Datapath and Control. Instructor: Jason D. Bakos. Goal. Design a CPU that implements the following instructions: lw, sw add, sub, and, or, slt beq, j. Datapath. Instruction Fetch Datapaths. PC <= PC + 4 Read_address <= PC. Register File and ALU.

E N D
CSCE 212Chapter 5The Processor: Datapath and Control Instructor: Jason D. Bakos
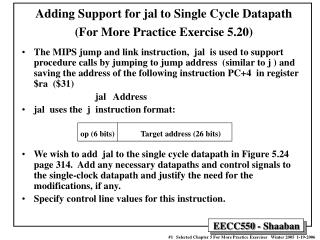
Goal • Design a CPU that implements the following instructions: • lw, sw • add, sub, and, or, slt • beq, j
Instruction Fetch Datapaths PC <= PC + 4 Read_address <= PC
BEQ Datapath Read_register_1 <= rs Read_register_2 <= rt ALU_in_1 <= (rs) ALU_in_2 <= (rt) Branch_control <= (rs)==(rt)? Branch_target <= PC+4+SE(imm)*4
Memory and R-type Datapath LW Read_address <= (rs)+SE(imm) ALU_in_1 <= (rs) ALU_in_2 <= SE(imm) Read_register_1 <= rs RegFile(rt) <= Mem((rs)+SE(imm)) Write_register <= rt Reg_write_data <= Read_data SW Read_address <= (rs)+SE(imm) ALU_in_1 <= (rs) ALU_in_2 <= SE(imm) Read_register_1 <= rs Mem((rs)+SE(imm)) <= (rt) Mem_write_data <= (rt) Read_register_2 <= rt R-type RegFile(rd) <= ALU_result ALU_in_1 <= (rs) ALU_in_2 <= (rt) Write_register <= rd Reg_write_data <= ALU_result
Simple MIPS Datapaths • Includes: • PC+4 • LW/SW • BEQ • R-type (add, sub, and, or, slt)
ALU Control • ALU performs function based on 4-bit ALU_operation input • Add a lookup table that instructs ALU to perform: • add (for LW, SW), or • subtract (for BEQ), or • perform operation as dictated by R-type function code
Single-Cycle • This is a single-cycle implementation • Each instruction is executed within one clock cycle • Must be set for worst-case delay (LW)
Multicycle Implementation • Break instruction execution into a sequence of steps • Adjust cycle time to be long enough to perform one basic operation • fetch, register read, ALU, memory access, register write • Must add registers to carry computed values from one cycle to next • Still can perform independent operations in parallel, i.e.: • fetch instruction and compute next PC address • read registers and compute branch address • Allows us to re-use ALU
Multicycle Control • Instruction fetch • Information available: PC • Performed for all instructions • RTL: • IR <= Memory[PC]; • PC <= PC + 4; • Instruction decode and register fetch • Information available: PC, instruction • Performed for all instructions • RTL: • A <= Reg[IR[25:21]]; • B <= Reg[IR[20:16]]; • ALUOut <= PC + (sign-extend(IR[15:0]) << 2);
Multicycle Control • Execution, memory address computation, or branch completion • Information available: PC, instruction, (rs), (rt), (ALUOut) • Memory reference: • ALUOut <= A + sign-extend(IR[15:0]); • Arithmetic-logical instruction (R-type): • ALUOut <= A op B; • Branch: • if (A == B) PC <= ALUOut; • Jump: • PC <= {PC[31:28], IR[25:0], “00”};
Multicycle Control • Memory access or R-type completion step • Information available: PC, instruction, (rs), (rt), (ALUOut) • Load: • MDR <= Memory[ALUOut]; • Store: • Memory[ALUOut] <= B; • Arithmetic-logical instruction (R-type): • Reg[IR[15:11]] <= ALUOut;
Multicycle Control • Memory read completion step • Information available: PC, instruction, (rs), (rt), (ALUOut), (MDR) • Load: • Reg[IR[20:16]] <= MDR;
Exceptions and Interrupts • Events other than branches or jumps that change the normal flow of instruction execution • Examples: • I/O device request (external, interrupt) • System call (internal, exception) • Arithmetic overflow (internal, exception) • Invalid instruction (internal, exception) • Hardware malfunction (internal or external, exception or interrupt)
Interrupts and Exceptions • What to do? • Execute code in response to event (handler) • Save PC (EPC reg,) • Record cause (Cause reg.) • Set new PC (4) • Return from handler • Restore PC • Enable e/i (shift Status reg.) • Determining type of exception • Use vectored exceptions • Infer type from address • Use polled exceptions • Use Cause register • This is what MIPS does
Example Implementation • Example: • Use polled approach • All exceptions and interrupts jump to single handler at address 8000 0180 • The cause is recorded in the cause register • The address of affected instruction is stored in EPC