Download
1 / 58
580 likes | 787 Views
Camera models and calibration. Read tutorial chapter 2 and 3.1 http://www.cs.unc.edu/~marc/tutorial/ Szeliski ’ s book pp.29-73. Schedule (tentative). 2D Ideal points. 3D Ideal points. 2D line at infinity. 3D plane at infinity. Brief geometry reminder.

E N D
Camera models and calibration Read tutorial chapter 2 and 3.1 http://www.cs.unc.edu/~marc/tutorial/ Szeliski’s book pp.29-73
2D Ideal points 3D Ideal points 2D line at infinity 3D plane at infinity Brief geometry reminder 2D line-point coincidence relation: Point from lines: Line from points: 3D plane-point coincidence relation: Point from planes: Plane from points: 3D line representation: (as two planes or two points)
Conics and quadrics l Conics x C l=Cx Quadrics
Theorem: A mapping h:P2P2is a projectivity if and only if there exist a non-singular 3x3 matrix H such that for any point in P2 reprented by a vector x it is true that h(x)=Hx Definition: Projective transformation or 8DOF 2D projective transformations Definition: A projectivity is an invertible mapping h from P2 to itself such that three points x1,x2,x3lie on the same line if and only if h(x1),h(x2),h(x3) do. projectivity=collineation=projective transformation=homography
Transformation for conics Transformation for dual conics Transformation of 2D points, lines and conics For a point transformation Transformation for lines
(eigenvectors H-T =fixed lines) Fixed points and lines (eigenvectors H =fixed points) (1=2 pointwise fixed line)
Hierarchy of 2D transformations transformed squares invariants Concurrency, collinearity, order of contact (intersection, tangency, inflection, etc.), cross ratio Projective 8dof Parallellism, ratio of areas, ratio of lengths on parallel lines (e.g midpoints), linear combinations of vectors (centroids). The line at infinity l∞ Affine 6dof Ratios of lengths, angles. The circular points I,J Similarity 4dof Euclidean 3dof lengths, areas.
The line at infinity The line at infinity l is a fixed line under a projective transformation H if and only if H is an affinity Note: not fixed pointwise
Affine properties from images projection rectification
Affine rectification l∞ v1 v2 l1 l3 l2 l4
The circular points The circular points I, J are fixed points under the projective transformation H iff H is a similarity
l∞ Algebraically, encodes orthogonal directions The circular points “circular points”
The dual conic is fixed conic under the projective transformation H iff H is a similarity Note: has 4DOF l∞ is the nullvector Conic dual to the circular points l∞
Projective: (orthogonal) Angles Euclidean:
Transformation of 3D points, planes and quadrics For a point transformation (cfr. 2D equivalent) Transformation for lines Transformation for quadrics Transformation for dual quadrics
Hierarchy of 3D transformations Projective 15dof Intersection and tangency Parallellism of planes, Volume ratios, centroids, The plane at infinity π∞ Affine 12dof Similarity 7dof Angles, ratios of length The absolute conic Ω∞ Euclidean 6dof Volume
The plane at infinity The plane at infinity π is a fixed plane under a projective transformation H iff H is an affinity • canonical position • contains directions • two planes are parallel line of intersection in π∞ • line // line (or plane) point of intersection in π∞
The absolute conic The absolute conic Ω∞ is a (point) conic on π. In a metric frame: or conic for directions: (with no real points) The absolute conic Ω∞ is a fixed conic under the projective transformation H iff H is a similarity • Ω∞is only fixed as a set • Circle intersect Ω∞ in two circular points • Spheres intersect π∞ in Ω∞
The absolute dual quadric The absolute dual quadric Ω*∞ is a fixed conic under the projective transformation H iff H is a similarity • 8 dof • plane at infinity π∞ is the nullvector of Ω∞ • Angles:
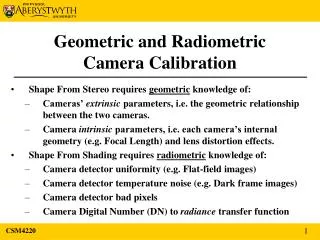
Camera model Relation between pixels and rays in space ?
Pinhole camera Gemma Frisius, 1544
Parallel lines meet • vanishing point
Vanishing points VPL H VPR VP2 VP1 To different directions correspond different vanishing points VP3
Geometric properties of projection • Points go to points • Lines go to lines • Planes go to whole image or half-plane • Polygons go to polygons • Degenerate cases: • line through focal point yields point • plane through focal point yields line
Pinhole camera model linear projection in homogeneous coordinates!
Principal point offset principal point
Principal point offset calibration matrix
non-singular General projective camera 11 dof (5+3+3) intrinsic camera parameters extrinsic camera parameters
Radial distortion • Due to spherical lenses (cheap) • Model: R R straight lines are not straight anymore http://foto.hut.fi/opetus/260/luennot/11/atkinson_6-11_radial_distortion_zoom_lenses.jpg
Camera model Relation between pixels and rays in space ?
Projector model Relation between pixels and rays in space (dual of camera) (main geometric difference is vertical principal point offset to reduce keystone effect) ?
Meydenbauer camera vertical lens shift to allow direct ortho-photographs
Action of projective camera on points and lines projection of point forward projection of line back-projection of line
Action of projective camera on conics and quadrics back-projection to cone projection of quadric
Direct Linear Transform (DLT) rank-2 matrix
minimize subject to constraint Direct Linear Transform (DLT) Minimal solution P has 11 dof, 2 independent eq./points • 5½ correspondences needed (say 6) Over-determined solution n 6 points use SVD
Degenerate configurations • Points lie on plane or single line passing through projection center • Camera and points on a twisted cubic
Data normalization • Scale data to values of order 1 • move center of mass to origin • scale to yield order 1 values
Line correspondences Extend DLT to lines (back-project line) (2 independent eq.)
Gold Standard algorithm • Objective • Given n≥6 2D to 3D point correspondences {Xi↔xi’}, determine the Maximum Likelyhood Estimation of P • Algorithm • Linear solution: • Normalization: • DLT • Minimization of geometric error: using the linear estimate as a starting point minimize the geometric error: • Denormalization: ~ ~ ~
Calibration example • Canny edge detection • Straight line fitting to the detected edges • Intersecting the lines to obtain the images corners • typically precision <1/10 • (H&Z rule of thumb: 5n constraints for n unknowns)
Errors in the image (standard case) Errors in the world Errors in the image and in the world