Download
1 / 41
410 likes | 428 Views
Structure-independent Sequential Equivalence Checking. EE290A UC Berkeley Spring 2005. Outline. Design verification Combinational vs. sequential equivalence checking Sequential equivalence checking by Reachability analysis Explicit vs. implicit Forward vs. backward

E N D
Structure-independent Sequential Equivalence Checking EE290A UC Berkeley Spring 2005 JHJ
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
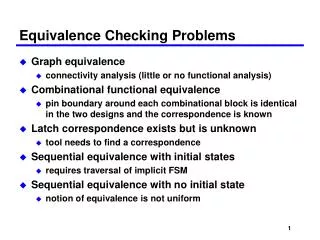
design verification Design verification • Equivalence verification is the most important problem in design verification • Hardness of equivalence verification • Combinational • Verification w/o structure similarities • NP-complete • Verification w/ structure similarities • P- to NP-complete • Sequential • Verification w/o structure similarities • PSPACE-complete • Verification w/ structure similarities • E.g., retiming equivalence • P- to PSPACE-complete
Combinational equivalence checking • Considered being solved in practical design instances • State-of-the-art solvers are powered with hybrid engines using BDD, SAT and AIG • Capable of verifying million-transistor microprocessor designs • Existence of structural similarities in real designs is the key to success • If the relation between state encodings is known, sequential equivalence checking reduces to combinational one • In general, combinational EC is not complete to prove sequential equivalence (i.e., equivalence between FSMs) • E.g., FSMs retimed and resynthesized with unknown transformation history, or FSMs optimized using sequential don’t cares
Sequential equivalence checking • Special case of invariant verification (safety property checking) • To describe properties, at times temporal formula are not sufficient (need a monitor!) • In SEC, the monitor is the correct FSM to be compared with • Used in the construction of product machines or multiplexed machines • Two approaches to SEC: reachability analysis vs. state space partitioning
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
SEC by state traversal • Product machine • Composition of an FSM and a monitor • Composition reveals bad states (state pairs with different output observations) • Cf. Mealy- and Moore-type FSMs
Reachability analysis • Explicit vs. implicit • Explicit graph enumeration • Reachability analysis over state transition graphs • Practical for FSMs less than ~10 state variables • Implicit symbolic computation • Iterative image computation over quantified Boolean formula • BDD- or SAT-based manipulations • One step traversal from C(s): Img(s’) = x, s. [i (si’ Ti(x,s))] C(s) • Practical for FSMs less than ~100 state variables • We will be concerned with implicit approaches based on BDDs O. Coudert et al: Verification of Synchronous Sequential Machines Based on Symbolic Execution. Automatic Verification Methods for Finite State Systems 1989: 365-373
Reachability analysis • Forward vs. backward • Forward analysis asks if bad states are reachable from initial states • Backward analysis asks if initial states are reachable from bad states • Two approaches are incomparable • A forward diameter can be exponentially shorter than a backward one, and vice versa • Meet-in-the-middle by combining both directions T. Filkorn: A Method for Symbolic Verification of Synchronous Circuits. Proc. Int'l Symp. Computer Hardware Description Languages and their Applications 1991: 249-259.
Reachability analysis • Exact vs. approximate • Exact image computation is complete but more expensive • Approximate image computation is cheaper but incomplete (has false-negative or false-positive) • Decomposing an FSM into several sub-FSMs • E.g., by partitioning state variables • Traverse each sub-FSM independently (over-approximation) • High-density reachability analysis (which combines BFS and DFS) can be either exact or under-approximate • Compute dense subsets of BDDs • Prefer a small BDD represent a large state set • Avoid memory explosion by subsetting newly reached state sets H. Cho, et. al: Algorithms for Approximate FSM Traversal. DAC 1993: 25-30. K. Ravi and F. Somenzi: High-density reachability analysis. ICCAD 1995: 154-158.
Reachability analysis • Deterministic vs. probabilistic • Deterministic • Exhaustive search • Probabilistic • Random walk on graphs • Monte Carlo or Las Vegas A. Kuehlmann, K. McMillan, R. Brayton: Probabilistic state space search. ICCAD 1999: 574-579
Reachability analysis • Other state traversal issues • Abstraction, localization • Cone of influence reduction • Transitive fanin in unfolded time-frame expansion • Quantification scheduling • Input/output splitting • …
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
SEC by state space partitioning • Arguing FSM equivalence from state equivalence • State equivalence • Two states of an FSM are equivalent iff, starting from any of them, the IO behaviors of the FSM cannot be differentiated • FSM equivalence • Two FSMs are equivalent iff, starting from their respective initial states, they are indistinguishable from their IO behaviors
State equivalence • Explicit vs. implicit • Explicit approach • Remove non-equivalent state pairs iteratively from a tableau • Implicit approach • Representing an equivalence relation with Boolean formula • Backward reachability analysis over product machine! • Representing equivalence classes with Boolean formula • Functional composition over the original machine (to be discussed) • We are concerned with implicit approaches
Identify state equivalence on product machine • Backward reachability analysis
FSM equivalence • Explicit vs. implicit • Explicit graph enumeration • State minimization followed by graph isomorphism checking • Implicit symbolic computation • Backward reachability analysis! • Functional composition (to be discussed)
Determine FSM equivalence on product machine • Backward reachability analysis
Identify state equivalence on original machine Given an n-state FSM M with r registers • Implicit computation of equivalent states • [Pixley, CAV’90; Lin et al., ICCAD’90] • Refine state equivalence relation on the product machine of two identical copies of M • Number of state variables: 2r • [Henriksen et al., TACAS’95] • Compute equivalence classes on M represented by n shared n-terminal BDDs • Number of state variables: r • Question: • Compute equivalence classes on M without special representations?
Identify state equivalence on original machine • M = (S, s0, , , , ) y=(s,x), s'=(s,x), sS, x, y • Relate output/transition tables to decomposition table in functional decomposition • Columns indexed by states; rows indexed by inputs • BDD-based functional decomposition • State variables bound set; input variables free set • Each column pattern in output table corresponds to an eqv node • Paths lead to same eqv node represent states in same eqv class
Identify state equivalence on original machine • Procedure • Consider time-frame expansions of M • Initially 0 has all states in the same equivalence class • y=(s,x) induces a partition 1 on the state space • Compute 1 by BDD-based functional decomposition
Identify state equivalence on original machine • Procedure (cont’d) • Represent 1 by a characteristic function 1(s) • Perform functional decomposition on 1((s,x)) to derive 2- • Compute 2 = 12- • Represent 2 by a characteristic function 2(s) • Iterate until reach fixpoint
Identify state equivalence on original machine • Robustness Issues for state equivalence • Work on reachable state subspace (if available) • BDD constrain operator [Coudert and Madre, ICCAD’90] + restricted BDD variable ordering • Restrict BDD variable ordering only when necessary
SEC by state space partitioning • Extend state equivalence to machine equivalence • Verification on multiplexed machine • Verification on separate machines • Verification on product machine • Theorem • M1 and M2 are equivalent iff their initial states, s10 and s20, are equivalent
Verification on Multiplexed Machine • Given two FSMs M1 and M2 with r1 and r2 registers respectively, construct their multiplexed machine M: • aux=0 M=M1; aux=1 M=M2
Verification on Multiplexed Machine • Procedure • Partition the state space of the multiplexed machine • Check if (as10) and (as20) are in the same equivalence class • Other aspects • Robustness issues: • Carry out verification for each output separately • Collapse “bad” equivalence classes • Error tracing and shortest distinguishing sequences
Product machine vs. multiplexed machine Given two completely specified FSMs M1 and M2 with r1 and r2 registers respectively • For product machine • Product state space • State variables: r1+r2 • For multiplexed machine • Sum state space • State variables: max{r1, r2}+1
Verification on Separate Machines • Procedure • Partition the state spaces of M1 and M2 separately but simultaneously • Maintain two sets of shared BDDs (share BDDs below cutset) • Check if s10 and s20 lead to the same equivalence node • Properties • No interference among state variables • No BDD sharing above cutset • Same number of state variables as product machine (Verification is still in the sum state space)
Verification on Product Machine • Properties • Flexible BDD variable ordering • More state variables than multiplexed machine • No direct BDD simplification using unreachable states
Analysis • Functional decomposition replaces quantifications • Given two FSMs M1 and M2 converging in n1 and n2 steps respectively, then their multiplexed machine converges in exactly max{n1, n2} steps (can be improved to min{n1, n2}) • Both ST (state traversal) and SP (state partitioning) find counterexamples in shortest input sequences • Suppose ST and SP converge in t and p steps respectively. Then min{t, p} is the upper bound for fixpoint computation.
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
Connection between reachability analysis and state equivalence • Assume bad states are unreachable from initial states in a product machine • Forward reachability analysis reveals equivalent state pairs reachable from initial state pairs • Backward reachability analysis reveals (all?) non-equivalent state pairs • Backward reachability analysis is more powerful in identifying equivalent states
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
Experimental Results • Compare three equivalence checking techniques • STPM state traversal on product machine • SPPM state partitioning on product machine • SPMM state partitioning on multiplexed machine • Conduct experiments on a Linux machine with Pentium III 700 MHz CPU, 2Gb RAM
Experimental Results • Elements to succeed • Reduce state variables almost by a half • Incorporate simplification using unreachable states • Verify each output separately • Parallel processing • Limitation • 106 equivalence classes per output
Experimental results • Identify state equivalence by BDD-based functional decomposition • Pose the equivalence checking problem as the state equivalence problem of the multiplexed machine • Verify benchmarks with up to 312 registers, including all of the control outputs of microprocessor 8085 • More scalable for high speed designs
Outline • Design verification • Combinational vs. sequential equivalence checking • Sequential equivalence checking by • Reachability analysis • Explicit vs. implicit • Forward vs. backward • Exact vs. approximate • Deterministic vs. probabilistic • State space partitioning • From state equivalence to FSM equivalence • Explicit vs. implicit • Connection between reachability and state equivalence • Experiments • Conclusions
Conclusions • Two different frameworks on SEC • State traversal based on reachability analysis • In product space • State space partitioning based on state equivalence • In product space or disjoint union space • SAT-based SEC • Unbounded model checking is based on state traversal on product machine • How about state space partitioning over multiplexed machine?