Download
1 / 14
140 likes | 400 Views
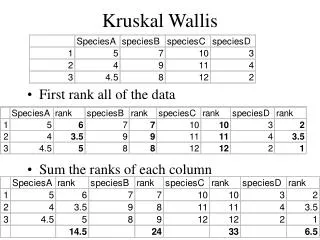
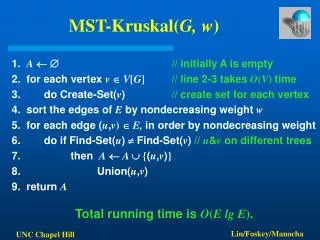
MST-Kruskal( G, w ). 1. A // initially A is empty 2. for each vertex v V [ G ] // line 2-3 takes O ( V ) time 3. do Create-Set( v ) // create set for each vertex 4. sort the edges of E by nondecreasing weight w

E N D
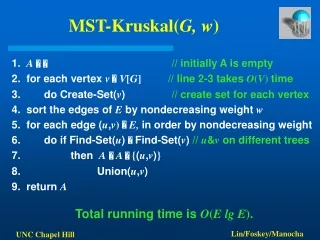
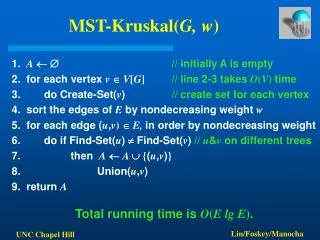
MST-Kruskal(G, w) 1. A // initially A is empty 2. for each vertex v V[G] // line 2-3 takesO(V) time 3. do Create-Set(v) // create set for each vertex 4. sort the edges of E by nondecreasing weight w 5. for each edge (u,v) E, in order bynondecreasing weight 6. do if Find-Set(u) Find-Set(v) // u&v on different trees 7. then A A {(u,v)} 8. Union(u,v) 9. return A Total running time is O(E lg E). Lin/Foskey/Manocha
Analysis of Kruskal • Lines 1-3 (initialization): O(V) • Line 4 (sorting): O(E lg E) • Lines 6-8 (set operations): O(E log E) • Total:O(E log E) Lin/Foskey/Manocha
Correctness of Kruskal • Idea: Show that every edge added is a safe edge for A • Assume (u, v) is next edge to be added to A. • Will not create a cycle • Let A’ denote the tree of the forest A that contains vertex u. Consider the cut (A’, V-A’). • This cut respects A (why?) • and (u, v) is the light edge across the cut (why?) • Thus, by the MST Lemma, (u,v) is safe. Lin/Foskey/Manocha
Intuition behind Prim’s Algorithm • Consider the set of vertices S currently part of the tree, and its complement (V-S). We have a cut of the graph and the current set of tree edges A is respected by this cut. • Which edge should we add next? Light edge! Lin/Foskey/Manocha
Basics of Prim ’s Algorithm • It works by adding leaves on at a time to the current tree. • Start with the root vertex r (it can be any vertex).At any time, the subset of edges A forms a single tree. S = vertices of A. • At each step, a light edge connecting a vertex in S to a vertex in V- S is added to the tree. • The tree grows until it spans all the vertices in V. • Implementation Issues: • How to update the cut efficiently? • How to determine the light edge quickly? Lin/Foskey/Manocha
Implementation: Priority Queue • Priority queue implemented using heap can support the following operations in O(lg n) time: • Insert (Q, u, key): Insert u with the key value key in Q • u = Extract_Min(Q): Extract the item with minimum key value in Q • Decrease_Key(Q, u, new_key): Decrease the value of u’s key value to new_key • All the vertices that are not in the S (the vertices of the edges in A) reside in a priority queue Q based on a key field. When the algorithm terminates, Q is empty. A = {(v, [v]): v V - {r}} Lin/Foskey/Manocha
Example: Prim’s Algorithm Lin/Foskey/Manocha
MST-Prim(G, w, r) 1. Q V[G] 2. for each vertex u Q // initialization: O(V) time 3. do key[u] 4. key[r] 0 // start at the root 5.[r] NIL // set parent of r to be NIL 6. while Q // until all vertices in MST 7. do u Extract-Min(Q) // vertex with lightest edge 8. for each v adj[u] 9. do if v Qand w(u,v) < key[v] 10. then [v] u 11. key[v] w(u,v) // new lighter edge out of v 12. decrease_Key(Q, v, key[v]) Lin/Foskey/Manocha
Analysis of Prim • Extracting the vertex from the queue: O(lg n) • For each incident edge, decreasing the key of the neighboring vertex: O(lg n) wheren = |V| • The other steps are constant time. • The overall running time is, where e = |E| T(n) = uV(lg n + deg(u)lg n) = uV (1+ deg(u))lg n = lg n (n + 2e) = O((n + e)lg n) Essentially same as Kruskal’s: O((n+e) lg n) time Lin/Foskey/Manocha
Correctness of Prim • Again, show that every edge added is a safe edge for A • Assume (u, v) is next edge to be added to A. • Consider the cut (A, V-A). • This cut respects A (why?) • and (u, v) is the light edge across the cut (why?) • Thus, by the MST Lemma, (u,v) is safe. Lin/Foskey/Manocha
Optimization Problems • In which a set of choices must be made in order to arrive at an optimal (min/max) solution, subject to some constraints. (There may be several solutions to achieve an optimal value.) • Two common techniques: • Dynamic Programming (global) • Greedy Algorithms (local) Lin/Foskey/Manocha
Dynamic Programming • Similar to divide-and-conquer, it breaks problems down into smaller problems that are solved recursively. • In contrast to D&C, DP is applicable when the sub-problems are not independent, i.e. when sub-problems share sub-subproblems. It solves every sub-subproblem just once and saves the results in a table to avoid duplicated computation. Lin/Foskey/Manocha
Elements of DP Algorithms • Substructure:decompose problem into smaller sub-problems. Express the solution of the original problem in terms of solutions for smaller problems. • Table-structure:Store the answers to the sub-problem in a table, because sub-problem solutions may be used many times. • Bottom-up computation:combine solutions on smaller sub-problems to solve larger sub-problems, and eventually arrive at a solution to the complete problem. Lin/Foskey/Manocha
Applicability to Optimization Problems • Optimal sub-structure (principle of optimality): for the global problem to be solved optimally, each sub-problem should be solved optimally. This is often violated due to sub-problem overlaps. Often by being “less optimal” on one problem, we may make a big savings on another sub-problem. • Small number of sub-problems:Many NP-hard problems can be formulated as DP problems, but these formulations are not efficient, because the number of sub-problems is exponentially large. Ideally, the number of sub-problems should be at most a polynomial number. Lin/Foskey/Manocha