Download
1 / 1
10 likes | 222 Views
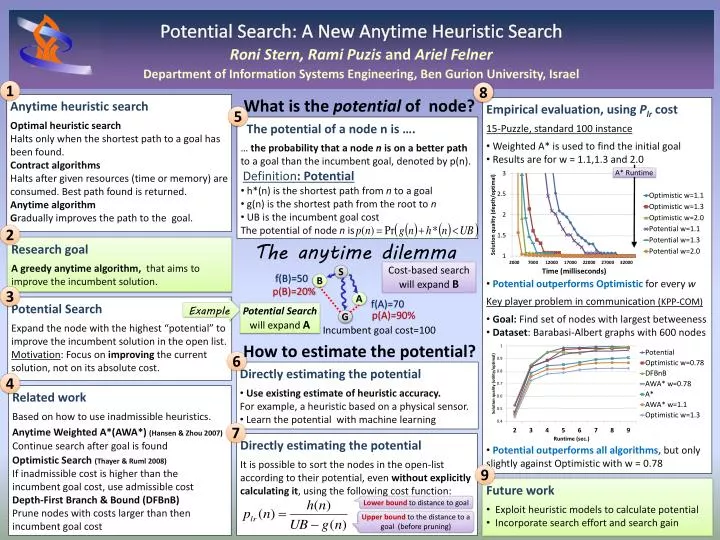
Potential Search: A New Anytime Heuristic Search Roni Stern, Rami Puzis and Ariel Felner Department of Information Systems Engineering, Ben Gurion University, Israel. 1. 8. Anytime heuristic search Optimal heuristic search Halts only when the shortest path to a goal has been found.

E N D
Potential Search: A New Anytime Heuristic Search Roni Stern, Rami Puzis and Ariel Felner Department of Information Systems Engineering, Ben Gurion University, Israel 1 8 Anytime heuristic search Optimal heuristic search Halts only when the shortest path to a goal has been found. Contract algorithms Halts after given resources (time or memory) are consumed. Best path found is returned. Anytime algorithm Gradually improves the path to the goal. What is the potential of node? • Empirical evaluation, using Plr cost • 15-Puzzle, standard 100 instance • Weighted A* is used to find the initial goal • Results are for w = 1.1,1.3 and 2.0 • Potential outperforms Optimistic for every w • Key player problem in communication (KPP-COM) • Goal: Find set of nodes with largest betweeness • Dataset: Barabasi-Albert graphs with 600 nodes • Potential outperforms all algorithms, but only slightly against Optimistic with w = 0.78 5 • The potential of a node n is …. • … the probability that a node n is on a better path to a goal than the incumbent goal, denoted by p(n). • Definition: Potential • h*(n) is the shortest path from n to a goal • g(n) is the shortest path from the root to n • UB is the incumbent goal cost • The potential of node n is 2 Research goal A greedy anytime algorithm, that aims to improve the incumbent solution. The anytime dilemma Cost-based search will expand B S f(B)=50 B A* Runtime p(B)=20% 3 A Example Potential Search Expand the node with the highest “potential” to improve the incumbent solution in the open list. Motivation: Focus on improving the current solution, not on its absolute cost. f(A)=70 Potential Search will expand A p(A)=90% G Incumbent goal cost=100 How to estimate the potential? 6 • Directly estimating the potential • Use existing estimate of heuristic accuracy. • For example, a heuristic based on a physical sensor. • Learn the potential with machine learning 4 Related work Based on how to use inadmissible heuristics. Anytime Weighted A*(AWA*) (Hansen & Zhou 2007) Continue search after goal is found Optimistic Search(Thayer & Ruml 2008) If inadmissible cost is higher than the incumbent goal cost, use admissible cost Depth-First Branch & Bound (DFBnB) Prune nodes with costs larger than then incumbent goal cost 7 Directly estimating the potential It is possible to sort the nodes in the open-list according to their potential, even without explicitly calculating it, using the following cost function: 9 • Future work • Exploit heuristic models to calculate potential • Incorporate search effort and search gain Lower bound to distance to goal Upper bound to the distance to a goal (before pruning)