Download
1 / 19
190 likes | 437 Views
Tyre and Vehicle Model Identification using Identifying Kalman Filters. Matthew C Best. Department of Aeronautical and Automotive Engineering Loughborough University, UK. Background. Kalman filters are used widely for state estimation, but rely on good, suitably simple vehicle / tyre models

E N D
Tyre and Vehicle Model Identification using Identifying Kalman Filters Matthew C Best Department of Aeronautical and Automotive Engineering Loughborough University, UK
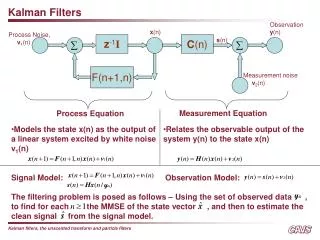
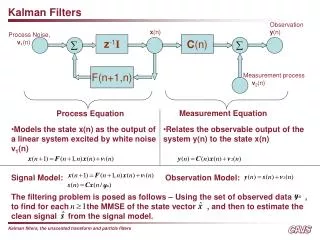
Background • Kalman filters are used widely for state estimation, but rely on good, suitably simple vehicle / tyre models • System identification provides a way to optimise simple model accuracy • The Extended Kalman filter can include parameter adaptation, but design covariance matrices still need to be chosen • If the full state set is measurable, the Extended Kalman filter can be re-configured for system identification directly
References [1] Best M.C., Gordon T.J. and Dixon P.J., ‘An Extended Adaptive Kalman Filter for Real-time State Estimation of Vehicle Handling Dynamics,’ Vehicle System Dynamics : International Journal of Vehicle Mechanics and Mobility, Vol 34, No 1, pp 57-75, 2000 [2]Best M.C. and Gordon T.J., ‘Combined State and Parameter Estimation of Vehicle Handling Dynamics’ proceedings from the 5th International Symposium on Advanced Vehicle Control (AVEC), Ann Arbor, USA, August 2000, pp 429-436 [3] Best, M.C., ‘Parametric Identification of Vehicle Handling using an Extended Kalman Filter’, International Journal of Vehicle Autonomous Systems, Vol 5, No 3 / 4, 2007, pp 256 - 273 [4] Best, M. C., Newton, A. P., and Tuplin, S.‘The identifying extendedKalman filter: parametric system identification of a vehicle handlingmodel’. Proc. Instn Mech. Engrs, Part K: J. Multi-body Dynamics, 2007,221(O1), 87-98 [5] Best, M. C.,‘Identifying Tyre Models Directly from Vehicle Test Data using an Extended Kalman Filter’. Vehicle System Dynamics : International Journal of Vehicle Mechanics and Mobility, forthcoming
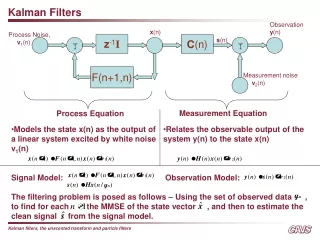
Extended Kalman Filter for State Estimation From Model and gradients Assuming : And Estimating : Real-time state estimate :
Combined State & Parameter Estimation [1],[2] Can extend the Model to include Parameters : But design covariance is not much easier, and still fixed :
Source model EAKF, l = 5x10-4 EAKF, l = 5x10-3 Real-time combined x and q Result [1]
Adaptive combined x and q Result [2] Mass (kg ´ 10-0.3) Yaw inertia, Izz (kgm2´ 10-0.3) Roll inertia, Ixx (kgm2´ 10-0.3) Mass centre fore/aft position (m ´ 0.3)
System Identification or Parameter Estimation ? If Eg by combined GPS / inertia instrumentation of test vehicle Replace state set completely. Model (h) only appears in y : then f = 0, F = 0 yk = [ r, v]Tor [ r, v, f, p]Tor [ r, v, ay]T
Dedicated System Identification [3],[4],[5] Error sequences now known explicitly Speed of convergence 0 <l < 1 Acceptable change in params (fast / slow)
Tyre Model Identification [3],[4] Objective : Identify a single, load dependent tyre model, directly from the vehicle data Parameters : • Pacejka curve B, C, D, E • (P, G, C, E here) • Steering compliance S • CG long. and vert. position, a, h 3dof model :
Vehicle Testing [4] OXTS RT3200 GPS / inertia measurement (6dof body kinematics) Steering input from CAN, 3.5l Jaguar XJ8 Test Vehicle 100Hz sampling rate, data & Kalman Filter Identification data : Four constant speeds, increasing step steer Validation data : ‘free drive’ around proving ground, varying speed & steer steer, d, (rad) yaw rate, r, (rad/s) sideslip, v, (m/s)
Parameter and Cost Convergence S q0qopt P 0.9 1.07 G 1.0 1.96 C 1.4 1.78 E -0.2 -2.29 S 2.0 4.52 a 1.5 1.69 h 0.5 0.41 C G a Parameter value & cost P h E Iteration number
Open loop state accuracy : Identification test S Sideslip velocity, v Yaw angular velocity, r Typical time history (s) Source data Original model Optimised model Roll angular velocity, p
Open loop state accuracy : Validation test Sideslip velocity, v Lateral acceleration, ay Section of time history (s) Source data Original model Optimised model Roll angular velocity, p
Identified Tyre Model : Normalised Plot front rear x : left Normalised lateral force + : right Normalised slip
Fast parameter adaptation : Friction tracking [5] Algorithm changes : • : was 0.01 now 0.1 t : was 350 now 0.01 q = [G] GPS position track : Proving ground wet handling track
Friction tracking result Source data (estimated from GPS trace and proving ground data Friction coefficient IEKF estimate Time (s)
Source data Invariant model m varying model Friction tracking : open loop state variation Sideslip velocity, v Time (s)
Conclusions • A simple model structure can provide very good state tracking • Combined state and parameter estimation can be effective, but needs accurate design covariance, and care with conditioning • A ‘reasonable’ model set-up can estimate yaw rate and lateral acceleration fairly easily • Optimisation of the tyre model improves these states, and dramatically improves sideslip velocity prediction • A single tyre model can be identified and validated, adding credibility to the sideslip velocity measurement accuracy claims of the GPS / inertia instrumentation manufacturers. • Fast adaptation is successful and can track rapid friction variation