Download
1 / 54
540 likes | 720 Views
Efficiently Solving Dynamic Markov Random Fields using Graph Cuts . Pushmeet Kohli Philip H.S. Torr Department of Computing Oxford Brookes University. Overview. Recycling Solutions. solve. S A. differences between A and B. P B*. Simpler problem. A and B similar. S B. Overview.

E N D
Efficiently Solving Dynamic Markov Random Fields using Graph Cuts Pushmeet Kohli Philip H.S. Torr Department of Computing Oxford Brookes University
Overview Recycling Solutions
solve SA differences between A and B PB* Simpler problem A and B similar SB Overview PA cheaper operation PB computationally expensive operation
Overview SA PA differences between A and B PB* PB SB
Contributions • A dynamic algorithm for the st-mincut problem. • Exact • Handle arbitrary changes • Minimize dynamic energy functions. • Efficient image segmentation in videos
Outline of the Talk • Markov Random Fields • Energy minimization using graph cuts • Minimizing dynamic energy functions • Experimental Results
Outline of the Talk • Markov Random Fields • Energy minimization using graph cuts • Minimizing dynamic energy functions • Experimental Results
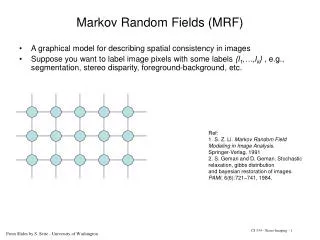
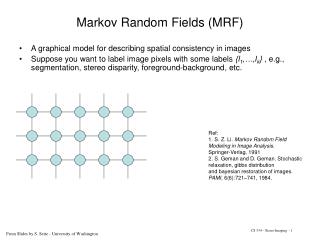
Markov Random Fields • Set of random variables (x) taking values from a label set e.g. • stereo (disparity) • image segmentation (‘fg’ or ‘bg’) • Energy of a configuration • E(x) = - log Pr(x|D) + constant • Less energy = More Probability
MRF for Image Segmentation Boykov and Jolly [ICCV 2001], Blake et al. [ECCV 2004] EnergyMRF = Unary likelihood Contrast Term Uniform Prior (Potts Model) Maximum-a-posteriori (MAP) solution x*= arg min E(x) x Data (D) Unary likelihood Pair-wise Terms MAP Solution
st-mincut s t Labelling problem MAP solution Solving MRFs using Graph cuts • Construct graph to represent the MRF energy • binary labels (Kolmogorov and Zabih [ECCV 2002]) • multiple labels (Ishikawa [PAMI 2003]) • Compute st-mincut by finding the max-flow • Obtain the exact MAP solution MRF Graph Cut
Outline of the Talk • Markov Random Fields • Energy minimization using graph cuts • Minimizing dynamic energy functions • Experimental Results
Energy Minimization using Graph cuts Graph Construction for Binary Random Variables EMRF(a1,a2) Source (0) a1 a2 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) =2a1 Source (0) 2 t-edges (unary terms) a1 a2 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1 Source (0) 2 a1 a2 5 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 Source (0) 2 9 a1 a2 5 4 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 +2a1ā2 Source (0) 2 9 a1 a2 2 5 4 n-edges (pair-wise term) Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 + 2a1ā2 +ā1a2 Source (0) 2 9 1 a1 a2 2 5 4 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 + 2a1ā2 +ā1a2 Source (0) 2 9 1 a1 a2 2 5 4 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 + 2a1ā2 +ā1a2 Source (0) 2 9 Cost of st-cut = 11 1 a1 a2 a1 = 1 a2 = 1 2 5 4 EMRF(1,1) = 11 Sink (1)
Energy Minimization using Graph cuts EMRF(a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 + 2a1ā2 +ā1a2 Source (0) 2 9 Cost of st-cut = 8 1 a1 a2 a1 = 1 a2 = 0 2 5 4 EMRF(1,0) = 8 Sink (1)
Energy Minimization using Graph cuts • Most probable (MAP) configuration ≡minimum cost st-cut. • st-mincut is in general a NP-hard problem • - negative edge weights • Solvable in polynomial time • non-negative edge weights • corresponds to sub-modular (regular) energy functions
Computing the st-mincut from Max-flow algorithms Source (0) • The Max-flow Problem • Edge capacity and flow balance constraints 2 9 • Notation • Residual capacity • (edge capacity – current flow) • Augmenting path 1 a1 a2 2 5 4 • Simple Augmenting Path based Algorithms • Repeatedly find augmenting paths and push flow. • Saturated edges constitute the st-mincut. • [Ford-Fulkerson Theorem] Sink (1)
Computing the st-mincut Source (0) Key Observation 9 + α 2 Adding a constant to both the t-edges of a node does not change the edges constituting the st-mincut. 1 a1 a2 2 4 + α 5 Sink (1) E (a1,a2) = 2a1 + 5ā1+ 9a2 + 4ā2 + 2a1ā2 +ā1a2 E*(a1,a2 ) = E(a1,a2) + α(a2+ā2) = E(a1,a2) + α [a2+ā2 =1]
Outline of the Talk • Markov Random Fields • Energy minimization using graph cuts • Minimizing dynamic energy functions • Experimental Results
Minimizing dynamic energy functions Problem Given a solution of [min Ea], compute [min Eb] • Partial Solution • Boykov and Jolly, Interactive Image Segmentation [ICCV01] • - limited to unary energy terms (t-edge capacities) • Our Contribution • Arbitrary changes in the energy (graph)
Minimizing dynamic energy functions Problem Given a solution of [min Ea], compute [min Eb] - Compute max-flow in Gb given the solution of Ga • Solution • Use the flows in Gato compute the st-mincut on Gb • Some flows may be more than new edge capacity! • Edge capacity constraints violated.
Satisfying Constraints • Possible Solution • Push excess flow back through the augmenting paths • Extremely computationally expensive • O(m) time for finding such path • Our Solution • - Re-parameterize the problem to satisfy constraints • Constant time per update operation [O(1)] [ m = number of edges ]
Dynamic Image Segmentation Image Segmentation Obtained Flows in n-edges
Maximum flow MAP solution First segmentation problem Ga difference between Ga and Gb residual graph (Gr) second segmentation problem updated residual graph G` Gb Our Algorithm
Graph Re-parameterization s flow/residual capacity 0/7 0/1 0/5 xi xj 0/9 0/2 0/4 t G original graph
Graph Re-parameterization Edges cut s flow/residual capacity 5/2 1/0 0/7 0/1 Compute Maxflow 3/2 0/5 xi xj xi xj 0/12 0/9 st-mincut 2/0 4/0 0/2 0/4 t t Gr G residual graph original graph
Update t-edgeCapacities s 5/2 1/0 3/2 xi xj 0/12 2/0 4/0 t Gr residual graph
Update t-edgeCapacities s capacity changes from 7 to 4 5/2 1/0 3/2 xi xj 0/12 2/0 4/0 t Gr residual graph
excess flow (e) = flow – new capacity = 5 – 4 = 1 Update t-edgeCapacities s capacity changes from 7 to 4 5/-1 1/0 3/2 xi xj edge capacity constraint violated! (flow > capacity) 0/12 2/0 4/0 t G` updated residual graph
excess flow (e) = flow – new capacity = 5 – 4 = 1 add e to both t-edges connected to node i Update t-edgeCapacities s capacity changes from 7 to 4 5/-1 1/0 3/2 xi xj edge capacity constraint violated! (flow > capacity) 0/12 2/0 4/0 t G` updated residual graph
Update t-edgeCapacities excess flow (e) = flow – new capacity s = 5 – 4 = 1 capacity changes from 7 to 4 5/0 1/0 add e to both t-edges connected to node i 3/2 xi xj edge capacity constraint violated! (flow > capacity) 0/12 2/1 4/0 t G` updated residual graph
Update n-edgeCapacities s • Capacity changes from 5 to 2 5/2 1/0 3/2 xi xj 0/12 2/0 4/0 t residual graph Gr
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! 5/2 1/0 3/-1 xi xj 0/12 2/0 4/0 t Updated residual graph G`
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! • Reduce flow to satisfy constraint 5/2 1/0 3/-1 xi xj 0/12 2/0 4/0 t Updated residual graph G`
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! • Reduce flow to satisfy constraint • causes flow imbalance! 1/0 5/2 2/0 excess xi xj 0/11 deficiency 2/0 4/0 t Updated residual graph G`
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! • Reduce flow to satisfy constraint • causes flow imbalance! • Push excess flow to/from the terminals • Create capacity by adding α = excess to both t-edges. 1/0 5/2 2/0 excess xi xj 0/11 deficiency 2/0 4/0 t Updated residual graph G`
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! • Reduce flow to satisfy constraint • causes flow imbalance! • Push excess flow to the terminals • Create capacity by adding α = excess to both t-edges. 5/3 2/0 2/0 xi xj 0/11 3/0 4/1 t Updated residual graph G`
Update n-edgeCapacities s • Capacity changes from 5 to 2 • - edge capacity constraint violated! • Reduce flow to satisfy constraint • causes flow imbalance! • Push excess flow to the terminals • Create capacity by adding α = excess to both t-edges. 5/3 2/0 2/0 xi xj 0/11 3/0 4/1 t Updated residual graph G`
Complexity analysis of MRF Update Operations *requires k edge update operations where k is degree of the node
Improving the Algorithm • Finding augmenting paths is time consuming. • Dual-tree maxflow algorithm [Boykov & Kolmogorov PAMI 2004] • Reuses search trees after each augmentation. • Empirically shown to be substantially faster. • Our Idea • Reuse search trees from previous graph cut computation • Saves us search tree creation tree time [O(#edges)] • Search trees have to be modified to make them consistent with new graphs • Constrain the search of augmenting paths • New paths must contain at least one updated edge
Reusing Search Trees c’ = measure of change in the energy • Running time • Dynamic algorithm (c’ + re-create search tree ) • Improved dynamic algorithm (c’) • Video Segmentation Example - Duplicate image frames (No time is needed)
Outline of the Talk • Markov Random Fields • Energy minimization using graph cuts • Minimizing dynamic energy functions • Experimental Results
Experimental Analysis • Compared results with the best static algorithm. • - Dual-tree algorithm [Boykov & Kolmogorov PAMI 2004] • Applications • Interactive Image Segmentation • Image Segmentation in Videos
Experimental Analysis Interactive Image segmentation (update unary terms) EnergyMRF= additional segmentation cues user segmentation cues static: 175 msec dynamic : 80 msec dynamic (optimized): 15 msec static : 175 msec
ExperimentalAnalysis Image segmentation in videos (unary & pairwise terms) EnergyMRF= Image resolution: 720x576 static: 220 msec dynamic (optimized): 50 msec Dynamic Graph Cuts Graph Cuts