Download
1 / 14
160 likes | 609 Views
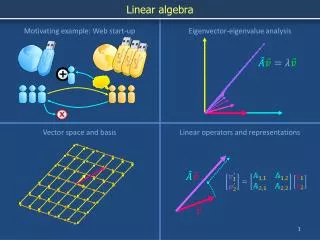
Basics of Linear Algebra. A review?. Matrix. Mathematical term essentially corresponding to an array An arrangement of numbers into rows and columns. Each row is the same length Each column is the same length Usually, we specify a position in the matrix as row, column. Vector.

E N D
Basics of Linear Algebra A review?
Matrix • Mathematical term essentially corresponding to an array • An arrangement of numbers into rows and columns. • Each row is the same length • Each column is the same length • Usually, we specify a position in the matrix as row, column
Vector • A one dimensional matrix • One row (or one column) • We can treat it as a special case of a matrix
Matrix operations • Matrix (vector) addition/subtraction • Add/subtract the corresponding elements in two matrices (vectors) of exactly the same size and shape. • If A = and B = • What is A + B? • Matrices can only be added or subtracted if they are exactly the same size and shape. 17 45 44 47 62 25 17 120 115 230 204 301 300 320
Multiplication • If A is an m x n matrix and B is an n x p matrix, then the product AB is an m x p matrix whose elements are defined by • cij = ∑aikbkj • That is, sum the term by term products of the elements in row I of A column j of B. n k = 1
Transposition • If A is m x n, the transpose of A is n x m. • The rows become columns and the columns become rows. • This is sometimes needed to put things into a form that is compatible for multiplication.
Properties • The identity matrix has 1s on the main diagonal and 0s elsewhere. • Multiplication by the identity matrix yields the original matrix. i.e. AI = IA = A • The size of the identity matrix is made to be compatible for the operation intended. • The zero matrix has 0 in every position. • If A, B, C are of appropriate sizes, then • A(BC) = (AB)C • A(B+C) = AB +AC • (A+B)C = AC + BC
Matrix inverse • The inverse (A-1) is defined such at A A-1 is I. • Not every matrix has an inverse. If no inverse exists, then the matrix is called singular (non invertible) • If A is nonsingular, so is A-1 • If A, B are nonsingular, then AB is also non singular and (AB) -1 = B -1A -1 (Note reversed order.) • If A is nonsingular, then so is its transpose and • (AT ) -1 = (A-1)T
Vectors and Vector Spaces x y • A vector with 2 elements (a 2-vector) is written as( ). • The vector is represented by a line in a plane, starting at the origin and ending at the point x,y. For x=2 and y=1: • The length of the vector is calculated using the Pythagorean theorem: ||vector|| = √ x2 + y2 (2,1)
Vector operations • Addition and subtraction consist of adding or subtracting the corresponding elements. Only vectors of the same size can be added/subtracted. • What does the sum of two vectors look like in the coordinate system?
Vector angles • There is an angle between any two vectors in the coordinate system. One way of comparing the vectors is to measure the angle between them. • Cos = Where ||X|| is the length, or magnitude, of X • X = ( ) Y =( ) x1x2 + y1y2 ||X|| ||Y|| x1 y1 x2 y2
Dot product and cosine • The dot product of vectors X, Y is defined as • X * Y = x1x2 + y1y2 • So, Cos = • If the cosine is 0, the vectors are at right angles. X * Y ||X|| ||Y||
Larger dimensions • It is easy to visualize vectors in two space, but larger dimensions are also useful. We cannot draw them so easily, but the properties of length, distance, etc. remain interesting. • We can draw 3-vectors. • Note that we cannot express the x axis in terms of the y axis. In 3-space, we cannot express any of x, y, z in terms of just the others. The three axes define the space. • When we look at the relationships between vectors that define index terms or queries, the relationship between them tells us whether they represent totally unrelated information, or information that is more or less related.
Reference for this review: • Introductory Linear Algebra with Applications • Bernard Kolman • Macmillan Publishing, 1984 • Chapters 1 and 3.