Download
1 / 33
390 likes | 626 Views
Introduction to AI Robots Chapter 9. Topological Path Planning. JBNU, Division of Computer Science and Engineering Parallel Computing Lab Jonghwi Kim. Chapter Objectives. Define the difference between a natural and artificial landmark and give one example of each

E N D
Introduction to AI Robots Chapter 9 Topological Path Planning JBNU, Division of Computer Science and Engineering Parallel Computing Lab Jonghwi Kim
Chapter Objectives • Define the difference between a natural and artificial landmark and give one example of each • Given a description of an indoor office environment and a set of behaviors, build a relational graph representation labeling the distinctive places and local control strategies using gateways • Describe in one or two sentences : gateway, image signature, visual homing, viewframe, orientation region • Given a figure showing landmarks, create a topological map showing landmarks, landmark pair boundaries, and orientation regions
Contents • Overview • Landmarks and Gateways • Relational Methods • Associative Methods • Case Study of Topological Navigation with a Hybrid Architecture • Summary
Overview Route representations fall into one of two approaches : • Relational • most popular • giving the robot an abbreviated, “connect the dots” graph-style of spatial memory • use an explicit representation, support path planning • focus on the graph-like representation of spatial memory • Associative • better for retracing known paths • focus on coupling sensing with localization
Landmarks and Gateways • Landmark • one or more perceptually distinctive features of interest on an object or locale of interest • not necessarily a single • can be a grouping of objects McDonald’s stand of aspen trees
Landmarks and Gateways • Landmark • be either artificial or natural • “artificial” and “natural” ≠ “man-made” and “organic” • artificial landmark • set of features added to an existing object or locale in order to either support recognition of the landmark or some other perceptual activity
Landmarks and Gateways • Landmark • natural landmark • configuration of existing features selected for recognition which were not expressly designed for the perceptual activity
Landmarks and Gateways • Landmark • must satisfy three criteria • Be readily recognizable • Support the task dependent activity • Be perceivable from many different viewpoints • good landmark’s characteristics • passive in order to be available despite a power failure • should be perceivable over the entire range where the robot might need to see it • should have distinctive features, and, if possible, unique feature
Landmarks and Gateways • Gateway • an opportunity for a robot to change its overall direction of navigation • critical for localization, path planning, and map making
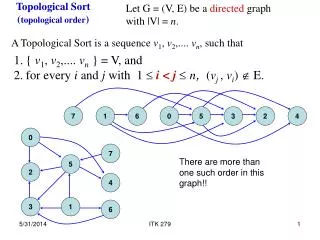
Relational Methods • Relational methods • represent the world as a graph or network of nodes and edges • Nodes • gateways, landmarks, or goals • Edges • a navigable path between two nodes • can attach additional information • direction(N,S,E,W), approximate distance, terrain type, the behaviors needed to navigate that path
Relational Methods • Earliest relational graphs for navigation(Smith and Cheeseman)
Relational Methods • Earliest relational graphs for navigation(Smith and Cheeseman)
Relational Methods • Relational graphs for navigation(Kuipers and Byun)
Relational Methods • Distinctive places • landmark that the robot could detect from a nearby region called a neighborhood
Associative Methods • Associative methods • create a behavior which converts sensor observations into the direction to go to reach a particular landmark • assumption • perceptual stability : that views of the location that are close together should look similar • perceptual distinguishability : that views far away should look different
Associative Methods • Visual homing • work done by Nelson, and later by Engelson • image signature • created by partitioning an image into sections • possible measurement • edge density • dominant edge orientation • average intensity • so on…
Associative Methods • Visual homing
Associative Methods • Visual homing
Associative Methods • QualNav(qualitative navigation) • the ideas from Levitt and Lawton • for outdoor navigation over large distances as part of the Defense Advance Research Projects Agency (DARPA) Autonomous Land Vehicle (ALV) project in the late 1980’s
Associative Methods • QualNav(qualitative navigation)
Case Study of Topological Navigation with a Hybrid Architecture • Case study of topological navigation using the SFX architecture in 1994 AAAI Mobile Robot Competition by a team of undergraduates form the Colorado School of Mines
Case Study of Topological Navigation with a Hybrid Architecture • placed in a random room • navigate out of the room and to another room within 15 minutes • be given a topological map • How the topological map was entered the activities of Cartographer • How scripts were used to simplify behavioral management, and the lessons learned
Case Study of Topological Navigation with a Hybrid Architecture • Path planning a sample topological map • start nodes • direction • blockages • landmark
Case Study of Topological Navigation with a Hybrid Architecture • Path planning • Cartographer • input : a gateway type, start node, goal node • output : a list of nodes representing the best path • preprocessing • reclassifying (a hall to door connection as Hd) • eliminates extraneous gateways • Task Manager • select the appropriate abstract navigation behavior d
Case Study of Topological Navigation with a Hybrid Architecture • Path planning
Case Study of Topological Navigation with a Hybrid Architecture • Path planning
Case Study of Topological Navigation with a Hybrid Architecture • Path planning
Case Study of Topological Navigation with a Hybrid Architecture • Path planning
Case Study of Topological Navigation with a Hybrid Architecture • Navigation scripts • used to specify and carry out the implied details of the plan • navigate-door ANB
Case Study of Topological Navigation with a Hybrid Architecture • navigate-hall ANB
Case Study of Topological Navigation with a Hybrid Architecture • navigate-foyer ANB
Case Study of Topological Navigation with a Hybrid Architecture • Lessons learned • critical to build the abstract navigation behaviors out of robust primitives (biggest problem is quality of the primitive behaviors) • contention for sensing resource • metric distance problem • impact of obstacles
Summary • Landmarks • simplify the ‘Where am I?’ problem • Gateways • special landmarks which reflect a potencial for the robot to change directions • navigation methods • relational • distinctive places(nodes), local control strategies(lcs) • associative • viewframe