Download

1 / 30
300 likes | 651 Views
組別: I 組員: 982006018 張鈞凱 982006021 賴偉源 982006016 王种皓. The Microsoft Kinect motion sensor. Kinect History Equipment Function 3D Motion sensor Light Coding Speckle Astigmatism Skeleton Tracking. Contents. Time-of-Flight Principle Application Kinect application. 分工. kinect.

E N D
組別:I 組員:982006018張鈞凱 982006021賴偉源 982006016王种皓 The Microsoft Kinect motion sensor
Kinect • History • Equipment • Function • 3D Motion sensor • Light Coding • Speckle • Astigmatism • Skeleton Tracking Contents • Time-of-Flight • Principle • Application • Kinect application
Kinect歷史 Kinnect外型 http://0rz.tw/f9EsR Kinnect http://www.xbox.com/zh-TW/kinect/ Wii http://www.elotrolado.es/tag/wii/ Wiimote http://www.wiiphysics.site88.net
Kinect歷史 Light coding技術 而什麼樣的技術 導致kinect脫穎而出呢? 左圖為Light coding中的雷射散斑現象 http://www.uns.org.tw/node/417 ←
Kinect歷史 http://0rz.tw/BlYyK
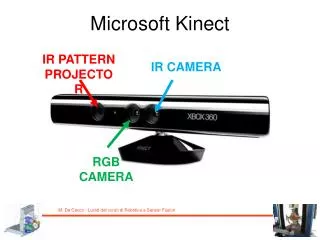
Kinect構造 3D深度感應器(左右): 由光源發出紅外線脈衝光照射被攝景物,而反射回來的紅外線則由 CMOS 影像感測器接收,再傳送到整合系統晶片,產生代表被攝景物距離的 VGA 解析度深度圖像,最後透過 USB 2.0 介面傳輸到主機進行進階辨識。 RGB視訊彩色攝影機(中): 將來自鏡頭光學圖像聚焦,經由CCD轉換為隨時間變化視頻訊號,再傳送到整合系統晶片,產生被攝景物顏色彩色圖像,最後透過 USB 2.0 介面傳輸到主機進行進階辨識。 陣列式麥克風(左1右3): 藉由多組麥克風同時收音,比對後消除掉雜音,有效過濾背景聲音,接著會經過程式配合鏡頭所識別使用者正確位置後,即可將語音識別擷取範圍鎖定在使用者身上,而不會識別到其他使用者所發出的聲音。 內建馬達運作: 讓Kinect可作27度的上下調整,同時提供Kinect自動調整焦距的功能,同時配有內建散熱風扇。 http://0rz.tw/RBpgk http://0rz.tw/dxMJU
Kinect功能 因此使得人體可以直接做為控制器而不需要任何的儀器來幫助操控 建立數位骨架,處理使用者的動作,亦可準確分辨不同使用者的動作 每個人在使用之前都須登錄,而記錄每個使用者的身體資料 辨識使用者聲音,濾掉房間的雜音,進而使用語音來控制kinect http://0rz.tw/rmJRj
There many methods for optical 3D mapping (i)laser speckle (ii)astigmatism (iii)diffraction and so on…. Light coding
What is laser speckle?? • REF: http://www.futurepicture.org/?p=116
IRlaser diode (class 1) (750~900nm)(12A) Diffuser:光柵、擴散片.. (12B) Astigmatic optical element(12B) Ref: ZeevZalevsky, Alexander Shpunt, AviadMaizels,JavierCarcia” Method and system for object reconstruction”
Astigmatism • Ref: Barak Freedman,AlexanderShpunt, YoelArieli “Distance-Varying illumination and image technology depth mapping”
F a 根據相似三角形 可以推得長度x(46) 長度y(60) x= (F-f)a/F , y= (F-f)b/f 同理如果距離astigmatic optical element為z時 就可以算出z所在位置 的長短軸長度 f b
Ref: Barak Freedman,AlexanderShpunt, YoelArieli “Distance-Varying illumination and image technology depth mapping
Ref: ZeevZalevsky, Alexander Shpunt,” Three-dimensional using speckle patterns”
Skeleton Tracking • Ref:http://msdn.microsoft.com/en-us/library/hh438998.aspx
Ref: Jong-wook Kang, Dong-junSeo, and Dong-seok Jung,” A Study on the control Method of 3-Dimensional Space Application using KINECT System”
Principle Light source (Laser Pulse) Target Lens Sensor d
Application – 3D Scanner Ref:http://herkules.oulu.fi/isbn9514269667/html/c305.html
People tracking Ref: Alessandro Bevilacqua, Luigi Di Stefano, PietroAzzari “People tracking using a Time-of-Flight depth sensor”
Ref: http://chinese.engadget.com/2011/11/02/kinect-commercial-sdk-coming-in-2012-video/
Light coding的技術是要獲得什麼資訊? Question 1
Skeleton Tracking是辨識人體上多少的關節來判斷人的動作? Question 2
Paper : Jong-wook Kang, Dong-junSeo, and Dong-seok Jung , ” A Study on the control Method of 3-Dimensional Space Applicationusing KINECT System” SalihBurakGokturk, Carlo Tomasi , ” 3D Head Tracking Based on Recognition and Interpolation Using a Time-Of-Flight Depth Sensor” Alessandro Bevilacqua, Luigi Di Stefano, PietroAzzari , “People tracking using a Time-of-Flight depth sensor” Patent: ZeevZalevsky, Alexander Shpunt, ” Three-dimensional using speckle patterns” Barak Freedman,AlexanderShpunt, YoelArieli , “Distance-Varying illumination and image technology depth mapping ” ZeevZalevsky, Alexander Shpunt, AviadMaizels,JavierCarcia ” Method and system for object reconstruction” Reference
Website: http://msdn.microsoft.com/en-us/library/hh438998.aspx http://www.futurepicture.org/?p=116 http://www.rp-photonics.com/speckle.html http://www.technologyreview.com/computing/26931/?mod=related http://herkules.oulu.fi/isbn9514269667/html/c305.html http://www.emeraldinsight.com/journals.htm?articleid=876315&show=html#0870200305001.png http://mag.udn.com/mag/digital/storypage.jsp?f_MAIN_ID=321&f_SUB_ID=2944&f_ART_ID=263927 http://mag.udn.com/mag/digital/storypage.jsp?f_ART_ID=242090#ixzz1gswDakbH http://www.xbox.com/zh-tw/Kinect/Kinect-Effect http://tw.myblog.yahoo.com/jw!dbpq0c6TAx_0UjjxIFdZOFw-/article?mid=1642 http://www.cmlab.csie.ntu.edu.tw/~jsyeh/wiki/lib/exe/fetch.php?media=%E8%91%89%E6%AD%A3%E8%81%96%E8%80%81%E5%B8%AB:kinect%E8%B3%87%E6%96%99_%E7%B4%94%E8%B3%A2_.pdf