Download
1 / 21
210 likes | 498 Views
KINECT. Kinect. Kinect for Windows Commercial version Near Mode No Xbox Kinect for Xbox Accessory for Xbox Input Sensor RGB camera Depth sensor Multi-array Microphone Motorized Tilt (+/- 27 degree). History. Original technology developed in 2005

E N D
Kinect • Kinect for Windows • Commercial version • Near Mode • No Xbox • Kinect for Xbox • Accessory for Xbox • Input Sensor • RGB camera • Depth sensor • Multi-array Microphone • Motorized Tilt (+/- 27 degree)
History • Original technology developed in 2005 • Announced in 2009 as codenamed Natal after the city and because of its relation to being “of or related to birth” • Released Kinect for Windows Beta on June 16, 2011 • On February 1st, released commercial version (which you now have access to for this class) • On May, released SDK 1.5
Why Kinect? • It is the first practical natural interface for machines communicating with people • It works in normal rooms • It is combining acoustical and visual sense • It is recognizing full body movements, even complicated ones • It is recognizing persons • It works well, it is not perfect but one can predict there will be much more in the future
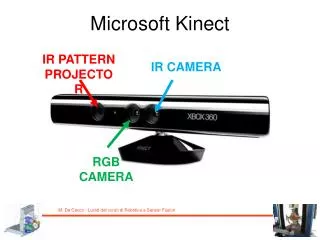
Sensors and Components IR Emitter Color Sensor IR Depth Sensor Tilt Motor Microphone Array
Vision Sensors RGB Camera IR Camera IR Laser Projector
Video Out • 30 fps • 57 degree • 8 bit VGA RGB 640x480 • 12 bit mono 320 x 240
Developement • Kinect for Windows Developer Toolkt • http://www.microsoft.com/en-us/kinectforwindows/ • Windows 7, Windows 8 Developer Preview • Microsoft VS 10 or above • Main Functionalities • RGB map • Depth map • Skeletal map and tracking • Audio • Facial recognition • Audio processing
Fundamental Data • Skeletal Data: Joints in 3D space • Provided in meters • Depth Data: “Near” and “Far” modes. Depth of each pixel. • Image Data: Different resolutions/frame rates • Audio Array: Speech Recognition SDK
Resolutions • Color • 12 FPS: 1280X960 RGB • 15 FPS: Raw YUV 640x480 • 30 FPS: 640x480 • Depth • 30 FPS: 80x60, 320x240, 640x480
Depth Data • Returns the distance and player for every pixel • Ex: 320x240 = 76,800 pixels • Distance • Distance in mm from Kinect ex: 4,000mm • Player • 1-6 players
Sample Kinect Projects • http://www.kinecthacks.com/top-10-best-kinect-hacks/ • http://radar.oreilly.com/2010/12/dancing-with-kinects-future-in.html • http://redmondmag.com/articles/2011/03/21/microsoft-kinect-hacks.aspx • http://channel9.msdn.com/coding4fun/kinect
For more information • http://www.microsoft.com/en-us/kinectforwindows/ • http://www.i-programmer.info/programming/hardware/2623-getting-started-with-microsoft-kinect-sdk.html • http://channel9.msdn.com/Series/KinectSDKQuickstarts • http://openkinect.org/wiki/Main_Page • http://code.google.com/p/kinect-research-framework/ • http://blogs.technet.com/b/microsoft_in_education/archive/2012/06/01/using-kinect-in-special-ed-classrooms-advice-from-loudoun-county-virginia-teachers.aspx • http://en.wikipedia.org/wiki/Kinect
Project Phase 1: Topic and Abstract - by Sep 18 (Wed) - 1 page document - Need approval to move Phase 2 Phase 2: Design and Modeling - Using Software Eng. Techniques (i.e., use case modeling, functionality modeling, plan and so on) - Document only - by Oct 2 (Wed)
Phase 3: Implementation - by Nov 6 (Wed) before class - Source Code (Final Deliverable) Phase 4: Demonstration - When: Nov 13 (Wed), Noon ~ 2:00 PM - Where: TCR Phase 5: Writing-Up - by Dec 4 (Wed) - Formal Writing-Up using IEEE or ACM format