Download
1 / 16
160 likes | 269 Views
A Navigation System for Increasing the Autonomy and the Security of Powered Wheelchairs. S. Fioretti, T. Leo, and S.Longhi yhseo, AIMM lab. Introduction. Research Activities related to smart powered wheelchairs VAHM project ,NavChair, The Hephaestus smart wheelchair, etc …

E N D
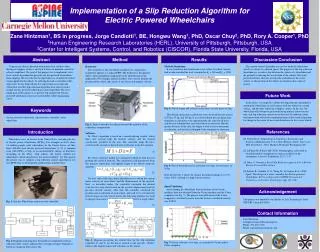
A Navigation System for Increasing the Autonomy and the Security of Powered Wheelchairs S. Fioretti, T. Leo, and S.Longhi yhseo, AIMM lab
Introduction • Research Activities related to smart powered wheelchairs • VAHM project ,NavChair, The Hephaestus smart wheelchair, etc … • Design of a proper navigation system and its integration with a commercial powered wheelchair, equipped with a user interface and sensor devices • The navigation system with a set of functions to increase the autonomy and the security if persons with motor disabilities with Sonar sensors • Two levels of autonomy are implemented giving the users different degrees of control • The integration approach to the design mainly relies on the adoption of multi-modal computer integration based on M3S protocol.
Design Criteria for The Navigation System of A Powered Wheelchair • Considerations for the design of the powered wheelchair navigation system (based on user’s need by interviewing people with different disabilities) • Different Psychological Attitudes • Role of Information • Acceptance of Informatic Tools • System Cost • System Dimensions • System Friendliness • Physical Appearance • Extroverted Tasks • Level of Autonomy • Design Criteria • Usability, acceptability, efficiency, security and costs
Navigation System • Architecture • Navigation sensors : dead-reckoning and external/environmental sensors • Sonar Map of the Environment • Sensors are positions and oriented in a manner to reduce of crosstalk and to detect obstacles along the direction of movement • Improvement of Reliability and accuracy of sonar measures • data fusion in a probabilistic local map of the environment • fuzzy logic and evidence method
Navigation System (Cont’d) • The Autonomy Levels of the Navigation Module • First Level : a simple filtering of the user’s commands • Stop + Wait action or Stop + Invocation of User Help action • Second Level : some local corrections on the user’s commands by a simple obstacle avoidance algorithm • user can’t control but can activate the Stop action
User Interface • The use of M3S protocol • to interface the user control devices with navigation system • reduce costs, rapid prototyping and easy to change or add • Interface based on a button and video display • video display : input action, system status, and output message areas
Operation Details andExperimental Result • The implementation of navigation system • PC 486DX2 with PC-104 bus • PC manages the sonar and the encoder reading and connection with M3S bus to user interface
Obstacle Avoidance • using algorithm based on the fuzzy rules • dead-lock situation have to be solved by the user
Conclusion • Shows the proper design of a navigation system which increase the autonomy and the security of commercial powered wheelchairs • The development of navigation module and its integration on a commercial powered wheelchair • Different level of autonomy for the navigation module have been developed and tested • A user interface with M3S interface which is simple both in commands requested and in information to the user