Download
1 / 48
480 likes | 614 Views
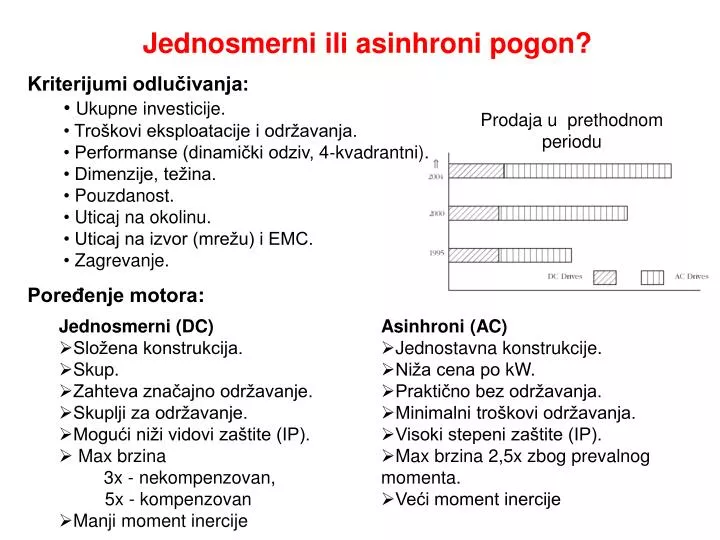
Jednosmerni ili asinhroni pogon? Kriterijumi odlučivanja: Ukupne investicije. Troškovi eksploatacije i održavanja. Performanse (dinamički odziv, 4‐kvadrantni). Dimenzije, težina. Pouzdanost. Uticaj na okolinu. Uticaj na izvor (mrežu) i EMC. Zagrevanje. Poređenje motora :.

E N D
Jednosmerni ili asinhroni pogon? • Kriterijumi odlučivanja: • Ukupne investicije. • Troškovi eksploatacije i održavanja. • Performanse (dinamički odziv, 4‐kvadrantni). • Dimenzije, težina. • Pouzdanost. • Uticaj na okolinu. • Uticaj na izvor (mrežu) i EMC. • Zagrevanje. • Poređenje motora: Prodaja u prethodnom periodu
MOTOR JEDNOSMERNE STRUJE Poprečni presek jednosmernog motora: if q– osa ili poprečna osa GP KN f d – osa ili uzdužna osa ia S me, PP PP a R f if ia f KN GP if Osnovni delovi: S – stator R – rotor GP – glavni polovi PP – pomoćni polovi KN – kompenzacioni namotaj.
pogonski kraj komutatorski kraj Četkice Opruge četkica Ležaj na komutatorskom kraju Ležaj na pogonskom kraju Rotor (armatura) Pomoćni pol sa namotajem Glavni pol i njegov namotaj Držač ležišta (komutatorski kraj) Zaštitni poklopac Konzola četkice Ventilator na rotoru Držač ležišta (pogonski kraj) Kućište namotaja statora
Osobine: - pogodne mehaničke karakteristike - jednostavno upravljanje - složena konstrukcija (komutator) - potrebno periodično održavanje - mala preopteretljivost (kompenzacioni namotaj) - ograničena maksimalna brzina. Primena: - regulisani pogoni - električna vuča.
Ra La + me, e Rf + + if f I ua M Lf uf mm Nf ia POGON SA MOTOROM JEDNOSMERNE STRUJE NEZAVISNA POBUDA Uprošćena, principijelna šema:
Motor, reduktor, opterećenje. reduktor motor jednosmerne struje opterećenje (valjak)
Matematički model, sistem jednačina: diferencijalne jednačine: (1) (2) (3) (4)
Konvertor za čelik – objašnjenje zavisnosti momenta opterećenja od pozicije 0 + 900 − 900 I M
Konvertor za čelik – objašnjenje zavisnosti momenta opterećenja od pozicije
algebarske jednačine: - ukupan fluks Karakteristika magnećenja - kada je mašina nezasićena
jf jfb Lfb Lf if ifb Karakteristika magnećenja jf
A: N: A: NORMALIZACIJA • - uprošćenje jednačina; • - eliminacija dimenzija svih veličina osim vremena; • svođenje vrednosti svih veličina na • isti nivo nezavisno od snage motora. A: - apsolutni domen; N: - normalizovani domen.
Postupak normalizacije: indeksi: - * normalizovana vrednost veličine x; - b bazna vrednost za veličinu x. Napomena: Indeks "*" se može izostaviti ako su sve veličine u izrazu normalizovane, ali se tada to mora naglasiti sa oznakom "N:". U mešovitim izrazima indeks "*" je obavezan. A: Jednačine i izrazi u apsolutnom domenu. N: Jednačine i izrazi u normalizovanom domenu. A: Jednačine i izrazi u apsolutnom domenu.
Bazne vrednosti osnovne (usvojene): izvedene:
NORMALIZACIJA MATEMATIČKOG MODELA POGONA Jednačina (1)/ !!!!!!!!!! Ta - elektromagnetna vremenska konstanta indukta.
Jednačina (2)/ !!!!!!!!!! Kada je mašina nezasićena: Tf– elektromagnetna vremenska konstanta induktora.
Jednačina (3) / Tm – mehanička vremenska konstanta pogona.
Jednačina (4)/b Priroda veličine (položaj) dozvoljava proizvoljno biranje njene bazne vrednosti. Za izabrano: dobija se:
STATIČKE KARAKTERISTIKE POGONA SA NEZAVISNO POBUĐENIM JEDNOSMERNIM MOTOROM Jednačine (1), (2) i (3) u stacionarnom stanju: A: Iz jednačine (4) u stacionarnom stanju sledi: = 0 !! Specijalni slučaj!!!
U nominalnom režimu: N: ua nom = 1; ia nom = 1; nom = 1 . Iz jednačine (1) se dobija: Ra nom- sopstveni otpor indukta. U praksi je: A: Kod manjih motora je Ra nom*veće, a kod većih motora je manje.
Sada se može napisati: N: ali < 1 !!! Takođe važi:
Iz jednačina koje važe u stacionarnom stanju dobijaju se analitički izrazi za statičke karakteristike motora - pogona. N: 0 – brzina idealnog praznog hoda – promena brzine usled opterećenja Takodje, dobija se i MEHANIČKA KARAKTERISTIKA:
UTICAJ DODATOG OTPORA U KOLU INDUKTA NA STATIČKE KARAKTERISTIKE N: Odnos promena brzine usled opterećenja:
Za određeno opterećenje (mm) brzina motora zavisi od vrednosti dodatog otpora:
w mm wo mm Potencijalna karakteristika opterećenja mm
w mm wo mm Reaktivna karakteristika opterećenja mm mm
UTICAJ PROMENE NAPONA INDUKTA NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnoj pobudi motora (f = const) statičke karakteristike: = i(ia) i = m (m'm) Važne napomene: 1. u praksi je -1< ua < 1; 2. u praksi je f = f nom; 3. posmatra se opseg promene opterećenja u kome magnetna reakcija indukta ne dolazi do izražaja (do m'mmax). Ovaj opseg određen je maksimalno dozvoljenom strujom motora (komutacijom) koja je u praksi ia max (1,5 ÷ 2,5). Prema tome:
w w N N 1 1 ia mm 1 <1
UTICAJ PROMENE POBUDE NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnom naponu indukta (ua = ua nom= const.) karakteristične vrednosti na mehaničkoj karakteristici su: N: brzina idealnog praznog hoda momenat kratkog spoja Napomena: Ova vrednost momenta kratkog spoja je fiktivna, stvarna vrednost momenta kratkog spoja je znatno manja zbog uticaja magnetne reakcije indukta.
wo mk w Promena statičkih karakteristika prilikom smanjenja fluksa. mm
Kod promene pobude, maksimalni moment je funkcija fluksa: smenom u i (ii )dobija se: HIPERBOLA!!!!! Maksimalna dozvoljena struja određuje oblast rada. Za trajni rad u oblasti slabljenja polja, mora se voditi računa o zagrevanju mašine. U trajnom radu trebalo bi da struja indukta bude manja ili jednaka nominalnoj.
Promene statičke karakteristike prilikom smanjenja fluksa. Kriva konstantne snage.
Polazeći od statičke karakteristike uz uslov: Promenu brzine u funkciji promene fluksa dobićemo rešavanjem jednačine: Zamenom rešenja u statičku karakteristiku, dobijamo maksimalnu brzinu pri smanjenju pobude HIPERBOLA - OBVOJNICA !!!! Mehanička snaga je tada maksimalna :
Zbog konstruktivnih razloga brzina motora je ograničena: Pa dobijamo: Praktično ima smisla samo smanjivati fluks:
Crna linija Granica mogućih radnih tačaka. Žuta linija Granica teorijski mogućih radnih tačaka. ♦● Momenti na maksimalnoj brzini ♦Nominalna radna tačka
KOMBINOVANO UPRAVLJANJE (PROMENOM NAPONA INDUKTA I PREKO POBUDE) f ua N: ua fnom e≈const.
PODRUČJE MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI. N: A1 A } ua=1 f< fnom B1 B } ua=1; f=fnom 0<ua<1 f= fnom ua = 0 C1 mm } C 0>ua>-1 f= fnom ua=-1; f=fnom D1 D } ua=-1 f< fnom E1 E
KOORDINATE KARAKTERISTIČNIH TAČAKA U PODRUČJU MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI NA PRIMERU. A: A1: B: B1:
KOORDINATE KARAKTERISTIČNIH TAČAKA U PODRUČJU MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI NA PRIMERU. C: C1: D: D1: E: E1: