Download
1 / 11
160 likes | 483 Views
Detection of signals in Noise. 指導老師 : 黃文傑 姓名 : 吳政修. outline. Review Bayes’ formula Decision rules Maximum a posteriori probability (MAP) ML detection in AWGN channel. Review Bayes’ formula. Conditional probability: Total probability: Bayes’ formula:.

E N D
Detection of signals in Noise 指導老師:黃文傑 姓名:吳政修
outline • Review Bayes’ formula • Decision rules • Maximum a posteriori probability (MAP) • ML detection in AWGN channel
Review Bayes’ formula • Conditional probability: • Total probability: • Bayes’ formula:
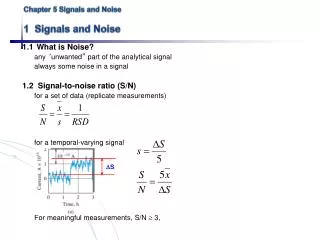
We apply the Bayes’ formula. First we assume that the observation vector x can take on a finite number of values, then given x, the probability that the symbol was transmitted.
Decision rules • The optimum detector chooses to minimize or equivalently, to maximize • The corresponding probability of being correct is
Maximum a posteriori probability (MAP) • The probability of the decision be correct, given that observing vector x, is • The probability of error is as follows • Thus the optimum decision observes the particular received vector X=x and the output chooses to maximize the .
MAP detection rule • MAP if for all Thus if all transmitted symbols occur equally likely, i.e. Then the decision is equivalent to the maximum likelihood decision rule. if for all
In an AWGN channel • In an AWGN channel • AWGN ML detection if for all The decision is to choose a message point closest to the received signal point, which is intuitively.
Optimum receiver • For a correlator receiver, we consider that 1.equally likely source symbols 2.AWGN channel Received signal Performed by a correlator receiver
procedure • Set if for all