Download
1 / 1
10 likes | 122 Views
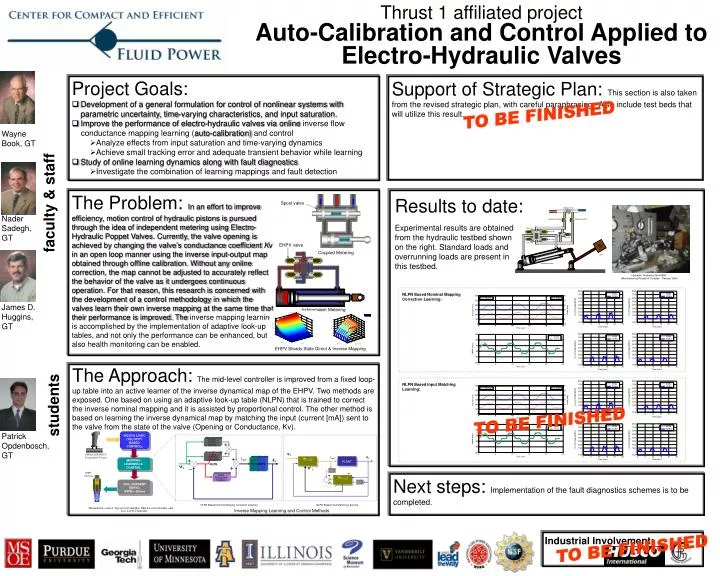
Thrust 1 affiliated project Auto-Calibration and Control Applied to Electro-Hydraulic Valves. Project Goals: Development of a general formulation for control of nonlinear systems with parametric uncertainty, time-varying characteristics, and input saturation.

E N D
Thrust 1 affiliated project Auto-Calibration and Control Applied to Electro-Hydraulic Valves • Project Goals: • Development of a general formulation for control of nonlinear systems with parametric uncertainty, time-varying characteristics, and input saturation. • Improve the performance of electro-hydraulic valves via online inverse flow conductance mapping learning (auto-calibration) and control • Analyze effects from input saturation and time-varying dynamics • Achieve small tracking error and adequate transient behavior while learning • Study of online learning dynamics along with fault diagnostics • Investigate the combination of learning mappings and fault detection Support of Strategic Plan: This section is also taken from the revised strategic plan, with careful paraphrasing. Also include test beds that will utilize this result. TO BE FINISHED Wayne Book, GT The Problem: In an effort to improve efficiency, motion control of hydraulic pistons is pursued through the idea of independent metering using Electro-Hydraulic Poppet Valves. Currently, the valve opening is achieved by changing the valve’s conductance coefficient Kv in an open loop manner using the inverse input-output map obtained through offline calibration. Without any online correction, the map cannot be adjusted to accurately reflect the behavior of the valve as it undergoes continuous operation. For that reason, this research is concerned with the development of a control methodology in which the valves learn their own inverse mapping at the same time that their performance is improved. The inverse mapping learning is accomplished by the implementation of adaptive look-up tables, and not only the performance can be enhanced, but also health monitoring can be enabled. faculty & staff Results to date: Spool valve Nader Sadegh, GT Experimental results are obtained from the hydraulic testbed shown on the right. Standard loads and overrunning loads are present in this testbed. EHPV valve Coupled Metering Hydraulic Testbed at the HIBAY (Manufacturing Research Complex - Georgia Tech) NLPN Based Nominal Mapping Correction Learning: James D. Huggins, GT Independent Metering EHPV Steady State Direct & Inverse Mapping The Approach:The mid-level controller is improved from a fixed loop-up table into an active learner of the inverse dynamical map of the EHPV. Two methods are exposed. One based on using an adaptive look-up table (NLPN) that is trained to correct the inverse nominal mapping and it is assisted by proportional control. The other method is based on learning the inverse dynamical map by matching the input (current [mA]) sent to the valve from the state of the valve (Opening or Conductance, Kv). NLPN Based Input Matching Learning: students TO BE FINISHED Patrick Opdenbosch, GT INCOVA LOGIC (VELOCITY BASED CONTROL) dKV OPERATOR INPUT: Commanded Velocity icmd KV MAPPING LEARNING &CONTROL EHPV Opening Next steps: Implementation of the fault diagnostics schemes is to be completed. COIL CURRENT SERVO (PWM + dither) NLPN Based Nominal Mapping Correction Learning NLPN Based Input Matching Learning Hierarchical control: Top Level Controller, Mid-Level Controller, and Low Level Controller Inverse Mapping Learning and Control Methods Industrial Involvement: TO BE FINISHED