Download
1 / 30
330 likes | 449 Views
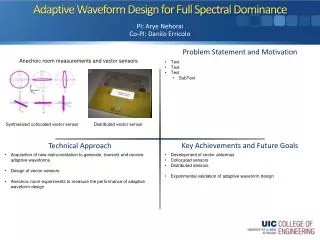
Radar Imaging and Waveform Design. Birsen Yazici Electrical, Computer and Systems Engineering Rensselaer Polytechnic Institute May 26, 2005. Outline. Range-Doppler imaging and adaptive diversity waveform design – B. Yazici and G. Xie

E N D
Radar Imaging and Waveform Design Birsen Yazici Electrical, Computer and Systems Engineering Rensselaer Polytechnic Institute May 26, 2005
Outline • Range-Doppler imaging and adaptive diversity waveform design – B. Yazici and G. Xie • Synthetic aperture inversion for arbitrary flight path in the presence of noise and interference – B. Yazici and M. Cheney • Conclusions
Filtered Backprojection Method • Range-Doppler imaging and waveform design based on simplified forward model that takes advantage of underlying invariant structure • SAR imaging based on physics based forward model that takes into antenna beam pattern, array configuration, transmitted pulse, geometric spreading factors and flight path
Range-Doppler Imaging • Ideal point target model • Ideal extended target model Doppler stretch Time delay Target reflectivity function
Clutter/Interference and Noise Models • Target : Object of interest • Clutter: All unwanted reflections and other scatterers • Noise : Thermal noise at the receiver
Problem Statement • How do we recover target reflectivity function embedded in noise and clutter? • What waveform(s) shall we transmit? • To suppress noise clutter/interference • For simultaneous estimation of target velocity and range
Approach • View received echo from target as the Fourier transform of the target with respect to affine group evaluated at the transmitted waveform • Fourier transform of functions defined on range and Doppler plans is not equal to the standard Fourier transforms with respect to range and Doppler • Fourier transform of functions defined on range-Doppler plane is a “matrix valued” function
Advantages • Address receiver and waveform design problems simultaneously • Bypasses the concept of ambiguity function • Waveform design for simultaneous estimation of target range and velocity • Provides design of clutter rejecting waveforms • Method of data fusion to synthesize high resolution range-Doppler images from multiple narrowband radars operating coherently
How to Estimate Target • Send sufficient number of pulses to cover the spectrum of the target • Use Fourier inversion formula for reconstruction – Filtered back projection
How to Suppress Clutter/Interference • Perform minimum mean square error filtering based on the spectra of target and clutter/interference • Optimal MMSE filter spectrum • Optimal filtering
Range-Doppler Image • Implement inverse Fourier transform in different ways to obtain different receiver and waveform design algorithms • Only need the diagonal terms for trace sum • Alternatively use matrix elements of each transform
Choose a set of differentiable orthonormal basesfor Transmit pulses ; Match the received echo to as follows Coherently sum all match filter outputs, Algorithm 1
Choose a set of differentiable orthonormal basesfor . Transmit pulses Match the received echo to , i.e. Multiply match filter output with , element of . Coherently sum all match filter outputs, Algorithm 2
Numerical Simulations Transmit waveforms derived from Laguerre polynomials Target Clutter
Numerical Simulations Wiener Filter Difference between waveforms used in Algorithm 2 and deterministic algorithm
Numerical Simulations Algorithm 2 Deterministic algorithm Algorithm 1 Comparison of Algorithm 1, Algorithm 2 and deterministic algorithm
Conclusions • Clutter rejection can be performed either in transmission or reception • Clutter rejection in transmission reduces receiver complexity • In adaptive transmission, matching is NOT performed with respect to transmitted waveforms • No limitation in the choice of orthogonal basis, but should be in the range space of the Wiener filter to avoid redundancy • Algorithms applicable to MIMO scenario • Narrowband case • Discrete affine group
SAR inversion for arbitrary flight path in the presence of noise and interference
: earth surface : flight track : ground reflectivity function : antenna beam pattern + waveform + geometrical spreading factors Forward Model
Problem Statement • Received data model : • C : unwanted ground reflectivity function • n:additive noise. • Problem : determine from .
Noise and Interference Model Additive noise model : Stationary in fast time, uncorrelated in slow time Target and interference model : Not necessarily stationary
Image Formation Form image by filtered back projection Determined by minimizing the mean square error
How to solve for the filter? • Apply change of variables so that when the forward and inverse map are composed the resulting operator is a pseudo differential operator. • Perform stationary phase calculations to determine the leading order contributions to mean square error • Perform variational calculations with respect to Q
(**) How to solve for the filter? In general the filter is the solution of an integral equation If we assume that the target and interference are stationary then, Jacobian coming from the change of variables When filter becomes
Numerical Simulations Target Target and interference Deterministic FBP reconstruction Statistical FBP reconstruction
Numerical Simulations Target Statistical FBP reconstruction Details of statistical FBP Deterministic FBP reconstruction Details of deterministic FBP Target and interference
Conclusion • Microlocal reconstruction extended to a statistical setting • Bistatic and multistatic mode of operation • Design of flight trajectories for multistatic UAVs • Design of waveforms
Inversion Methods • Solving PDEs (Bellini et al. 1979) • Filtered backprojection (Tretiak et al. 1980, Metz et al. 1995, Kuchment et al. 1994) • Fourier Relation (Tretiak et al., Innouye et al. 1989, Metz & Pan, Kuchment et al.) • Circular harmonic decomposition (Hawkins et al. 1988)
Fourier Transform of the Affine Group • Irreducible unitary representations of the affine group : • Fourier transform : • Fourier inversion : • Discrepancy operator: