Download
1 / 20
200 likes | 222 Views
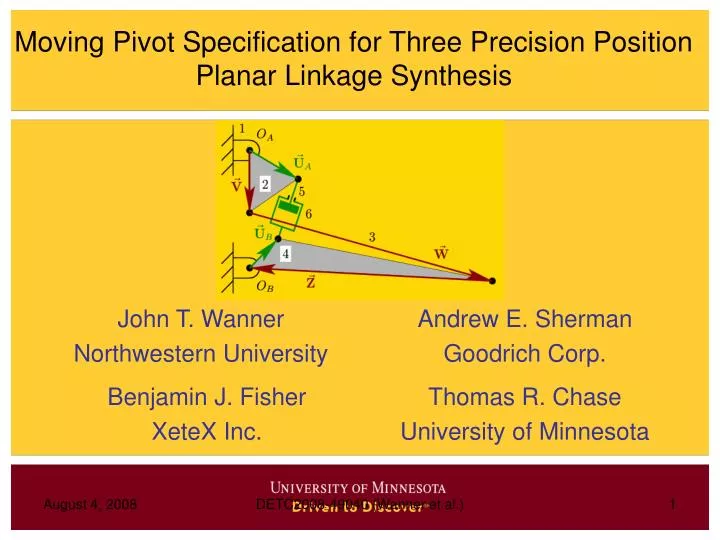
Moving Pivot Specification for Three Precision Position Planar Linkage Synthesis. John T. Wanner Northwestern University. Andrew E. Sherman Goodrich Corp. Benjamin J. Fisher XeteX Inc. Thomas R. Chase University of Minnesota. Motivation. Textbook. Textbook. analytical solution:.

E N D
Moving Pivot Specification for Three Precision Position Planar Linkage Synthesis John T. Wanner Northwestern University Andrew E. Sherman Goodrich Corp. Benjamin J. Fisher XeteX Inc. Thomas R. Chase University of Minnesota DETC2008-49040 (Wanner et al.)
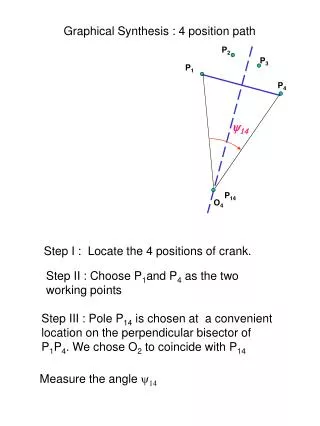
Motivation Textbook Textbook analytical solution: graphical solution: DETC2008-49040 (Wanner et al.)
Overview • Relation to existing solutions • Develop synthesis equations for dyads • Extension to triads & example:Stephenson I vehicle suspension linkage DETC2008-49040 (Wanner et al.)
Closely Related Solutions • Graphical equivalent (textbooks): Hall (1961), Erdman et al. (2001), Norton (2004) • Complex # solution: programmable, speed, accuracy • Algebraic equivalent: Bawab and Thiruvenkatachari (1995) • Complex # solution: consistency with other complex # solutions; direct solution for link rotations; expanded beyond 4-bars DETC2008-49040 (Wanner et al.)
Loosely Related Solutions • Ground pivot specification: Loerch et al. (1975), Suh & Radcliffe (1978) • Hybrid complex # solution (specify angle of coupler at position 1 & angles of vectors locating ground pivots): Soni (1974) DETC2008-49040 (Wanner et al.)
Basic Loop Equation DETC2008-49040 (Wanner et al.)
Knowns vs. Unknowns DETC2008-49040 (Wanner et al.)
Closing the Loop DETC2008-49040 (Wanner et al.)
Locating the Ground Pivot DETC2008-49040 (Wanner et al.)
Lower Link Angles DETC2008-49040 (Wanner et al.)
Summary: 3PP Motion Gen, Moving Pivot Specification DETC2008-49040 (Wanner et al.)
Application: Solar Vehicle Suspension Design DETC2008-49040 (Wanner et al.)
Synthesis Strategy DETC2008-49040 (Wanner et al.)
1. Set Wheel Travel DETC2008-49040 (Wanner et al.)
2. Set Damper Motion DETC2008-49040 (Wanner et al.)
JMTAD Vol 109 No 4 (1987) DETC2008-49040 (Wanner et al.)
3. Synthesize Triad (Part 1) DETC2008-49040 (Wanner et al.)
3. Synthesize Triad (Part 2) DETC2008-49040 (Wanner et al.)
Suspension Final Solution DETC2008-49040 (Wanner et al.)
Summary • Solution of moving pivot specification for dyads at 3 prec pos using complex #’s • Easily programmed • Speed & accuracy advantages over well known graphical solutions • Easily extended to triads (for 6-bars & beyond) using relative precision positions • Example: Solar vehicle Stephenson I 6-bar suspension DETC2008-49040 (Wanner et al.)