Download
1 / 21
330 likes | 1.1k Views
Dynamic Systems And Control. Course info. Introduction (What this course is about). Course home page. Home page : http://www.cs.huji.ac.il/~control. Course Info. Home page : http://www.cs.huji.ac.il/~control

E N D
Dynamic Systems And Control Course info. Introduction (What this course is about)
Course home page • Home page: http://www.cs.huji.ac.il/~control Lavi Shpigelman, Dynamic Systems and control – 76929 –
Course Info • Home page: http://www.cs.huji.ac.il/~control • Staff: Prof. Naftali Tishby (Ross, room 207)Lavi Shpigelman (Ross, room 61) • Class:Sunday, 12-3pm, ICNC • Grading • 40% exercises, 60% project • Textbooks: • Chi-Tsong Chen, Linear System Theory and Design, Oxford University Press, 1999 • Robert F. Stengel, Optimal Control and Estimation, Dover Publications, 1994 • J.J.E. Slotine and W. Li, Applied nonlinear control, Prentice Hall, Englewood cliffs, New Jersey, 1991 • H. K. Khalil, Non-linear Systems, Prentice Hall, 2001 Lavi Shpigelman, Dynamic Systems and control – 76929 –
Intro – Dynamical Systems • What are dynamic systems? Lavi Shpigelman, Dynamic Systems and control – 76929 – Physical things with states that evolve in time
(Optimal) Control Objective: Interact with a dynamical system to achieve desired goals • Stabilize nuclear reactor within safety limits • Fly aircraft minimizing fuel consumption • Pick up glass without spilling any milk Lavi Shpigelman, Dynamic Systems and control – 76929 – ...Measures of optimality
Example:Prosthetics bionics • Problem:Make a leg that knows when to bend. • Inputs: • Knee angle. • Ankle angle. • Ground pressure. • Stump pressures. • Outputs: • Variable joint stiffness and damping Lavi Shpigelman, Dynamic Systems and control – 76929 –
Example: Robotics, Reinforcement Learning • How do you stand up? • How do you teach someone to stand up? • Reinforcement learning: Let the controller learn by trial and error and give it general feedback (reinforce ‘good’ moves). • Training a 3 piece robot to stand up: • Start of training: • End of training: Lavi Shpigelman, Dynamic Systems and control – 76929 –
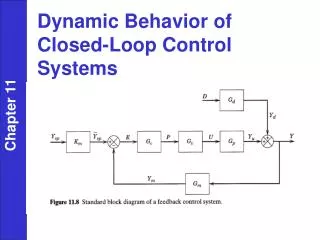
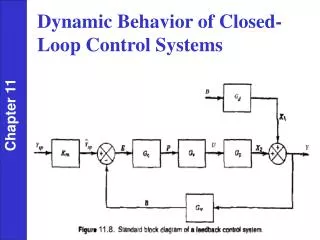
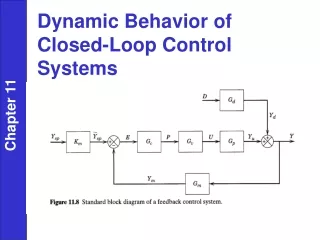
Control Signals Task Goal Controller Plant Observations Modeling (making assumptions) Graphical representation (information flow) Lavi Shpigelman, Dynamic Systems and control – 76929 – Mathematical relationships
Control Example: Motor control Plant (controlled system): hand Controller: Nervous System Control objective:Task dependent (e.g. hit ball) Plant Inputs: Neural muscle activation signals. Plant Outputs: Visual, Proprioceptive, ... Plant State: Positions, velocities, muscle activations, available energy… Controller Input: Noisy sensory information Controller Output: Noisy neural patterns plant cont-roller Lavi Shpigelman, Dynamic Systems and control – 76929 –
Control Signals Neural Pattern Task Goal Brain controller Handplant Observations sensory Feedback Modeling Motor Control Lavi Shpigelman, Dynamic Systems and control – 76929 – Details…
Optimal Movements • Control Objective: Reach from a to b. • Fact: more than one way to skin a cat... • How to choose: Add optimality principle • E.g. optimality principle: Minimum variance at b. • Modeling assumption(s): Control is noisy: noise/ ||control signal|| • Control problem: find the “optimal” control signal. • Note: No feedback (open loop control) Lavi Shpigelman, Dynamic Systems and control – 76929 –
Modeling Motor Control - Details sensory - motor control loop Lavi Shpigelman, Dynamic Systems and control – 76929 – Wolpert DM & Ghahramani Z (2000) Computational principles of movement neuroscienceNature Neuroscience 3:1212-1217
State Estimation – step 1 • Open loop estimate (w/o feedback) Lavi Shpigelman, Dynamic Systems and control – 76929 –
State Estimation – step 2 • Step 1: Control signal & a forward dynamics model (dynamics predictor) updates the change in state estimate. • Step 2:Sensory information & forward sensory model (sensory predictor) are used to refine the estimate Lavi Shpigelman, Dynamic Systems and control – 76929 –
Context Estimation (Adaptive Control) Lavi Shpigelman, Dynamic Systems and control – 76929 –
Adaptive Control generation • An inverse model learns to translate a desired state (sequence) into a control signal. • A non-adapting, low gain feedback controller does the same for the state error. Its output is used as an error signal for learning the Inverse model. Lavi Shpigelman, Dynamic Systems and control – 76929 –
u m External force (u) Contraction (y) Shock Absorber Simple(st) Dynamical System Example • Consider a shock absorber. • We wish to formulate a dynamical system model of the mass that is suspended by the absorber. • We choose a linear Ordinary Differential Equation (ODE) of 2nd order Lavi Shpigelman, Dynamic Systems and control – 76929 – net force damping force spring force external force y
Observable ProcessOutputs y Controllable inputsu Observationsz ObservationProcess Dynamic Process State x Process noise w Observation noise n Plant Elements of the Dynamic System Lavi Shpigelman, Dynamic Systems and control – 76929 – State evolving with time (differential equations)
Controllability & Observability of the Dynamic Process States Main issues:stabilitystabilizability Controllable Controllable inputsu Observable controlled observed ObservableOutputs y Lavi Shpigelman, Dynamic Systems and control – 76929 – Disturbance (noise) w Uncontrolled Unobserved Dynamic Process States x
Other Modeling Issues* • Time-varying / Time-invariant • Continuous time / Discreet time • Continuous states / Discreet states • Linear / Nonlinear • Lumped / Not-lumped (having a state vector of finite/infinite dimension) • Stochastic / Deterministic More: • Types of disturbances (noise) • Control models Lavi Shpigelman, Dynamic Systems and control – 76929 – * All combinations are possible
Rough course outline • Review of continuous (state and time), Linear, Time Invariant, state space models. • Linear algebra, state space model, solutions, realizations, stability, observability, controllability • Noiseless optimal control (non linear) • Loss functions, calculus of variations, optimization methods. • Stochastic LTI Gaussian models • State estimation, stochastic optimal control • Model Learning • Nonlinear system analysis • Phase plane analysis, Lyapunov theory. • Nonlinear control methods • Feedback linearization, sliding control, adaptive control, Reinforcement learning, ML. Lavi Shpigelman, Dynamic Systems and control – 76929 –