Download
1 / 1
10 likes | 168 Views
Using Power in Rayleigh Lidar for Middle and Upper Atmospheric Studies John Westerhoff 1 , Gary Swenson 2 , Chester Gardner 2 , Nathaniel Liu 2 1 Department of Aerospace Engineering 2 Department of Electrical and Computer Engineering University of Illinois at Urbana-Champaign.

E N D
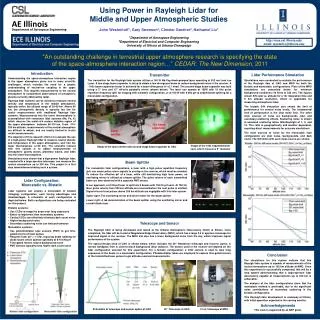
Using Power in Rayleigh Lidar for Middle and Upper Atmospheric Studies John Westerhoff1, Gary Swenson2, Chester Gardner2, Nathaniel Liu2 1Department of Aerospace Engineering 2Department of Electrical and Computer EngineeringUniversity of Illinois at Urbana-Champaign AE Illinois Department of Aerospace Engineering http://rsss.csl.illinois.edu/ email: westerho@illinois.edu “An outstanding challenge in terrestrial upper atmosphere research is specifying the state of the space-atmosphere interaction region…” CEDAR: The New Dimension, 2011 Bistatic Configuration Telescope Results/Data Introduction Lidar Performance Simulation Transmitter Understanding the space-atmosphere interaction region in the upper atmosphere gives rise to many scientific challenges, which includes the need for a greater understanding of neutral-ion coupling in the upper atmosphere. This requires measurements of the neutral atmosphere to complement observations of ionospheric plasma currently obtained by radar. Rayleigh lidar systems can be utilized to measure neutral density and temperature in the middle atmosphere, typically within the altitude range of 30-90 km. Above 90 km, the atmospheric density is typically too low for useful measurements with traditional Rayleigh lidar systems. Measurements into the lower thermosphere is accomplished with resonance lidar systems (Na, Fe, K) which observe the metal-rich meteor oblation region of the upper atmosphere between 80-110 km. From ~110-200 km altitude, measurements of the neutral atmosphere are difficult to obtain, and are mostly limited to in-situ rocket measurements. The objective of this research effort is to evaluate the use of a high-power Rayleigh lidar to measure neutral density and temperature in the upper atmosphere, well into the lower thermosphere (>120 km). The scientific interest with this system is to obtain measurements of atmospheric gravity waves, planetary waves, and tides into the lower thermosphere. Simulations have shown that a high-power Rayleigh lidar, coupled with a large aperture telescope, can measure the neutral atmosphere up to 200 km. This project is a first step toward demonstrating such a system. The transmitter for the Rayleigh lidar system utilizes a 150 W Nd:Yag diode-pumped laser operating at 532 nm from Lee Laser. A two-stage beam expander is setup to obtain a low divergence beam to reduce background noise in the receiver. A ~100x beam expansion factor is achieved for a beam divergence of <0.1 mrad. The second-stage beam expander was built using a 2” lens and 12” off-axis parabolic mirror (shown below). The laser can operate at 150W with 10 kHz pulse repetition frequency (prf) for imaging with a bistatic configuration, or at 100 W with 6 kHz prf to enable beam splitting for a monostatic configuration. Simulations were conducted to evaluate the performance of the Rayleigh lidar at UAO and MRO for both the bistatic and monostatic configurations. Plots of the MRO simulations are presented below for minimum background conditions (10 R/nm at 532 nm). The figures shown S/N ratio vs. altitude for a 1hr integration time and 5 km altitude resolution, which is applicable for measuring atmospheric tides. The bistatic S/N simulation plot shows the limit of performance for several noise levels. The fundamental limit of performance is the shot noise limit. The other main sources of noise are backgrounds (sky) and secondary-scattering effects. Scattering noise is shown at assumed scattering ratios (Mie/Rayleigh) of 1, 5, and 10. This ratio is geographically and weather dependent, requiring direct measurements for accurate simulations. The main sources of noise for the monostaticlidar configuration are shot noise, backgrounds, and dark count. The S/N limits with each noise source are shown. 12x beam expander Laser emitter Image of the 100x expanded laser spot, which measures 9” diameter Setup of the laser emitter and second-stage beam expander at UAO Beam Splitter For monostaticlidar configurations, a laser with a high pulse repetition frequency (prf) can cause pulse return signals to overlap in the receiver, which must be avoided. To reduce the effective prf of a laser, while still maintaining high laser power, an oscillating mirror is utilized as a beam splitter. The pulse returns of each transmitted beam are then observed with a separate PMT sensor. In our approach, a 6 kHz prf laser is split into 8 beams with 750 Hz prf each. At 750 Hz, laser pulse returns from 200 km altitude are received before the next pulse is emitted. Signal returns from pulses above 200 km altitude are negligible with this lidar system. Upper right: The oscillating mirror and driver motor for the beam splitter Lower right: A lab demonstration of the beam splitter using the oscillating mirror and a small diode laser. Lidar Configuration: Monostatic vs. Bistatic • Lidar systems can employ a monostatic or bistatic (imaging) configuration, each having advantages and disadvantages. A schematic of each configuration is depicted below. Both configurations are being evaluated for this project. • Bistatic systems: • Use CCDs to image the beam over long exposures • Easier to implement than monostatic systems • Cooled CCDs can effectively eliminate dark count noise • Higher background noise • Secondary scattering noise can limit performance • Monostatic systems: • Use photomultiplier tube sensors (PMT) to get time-gated returns of laser pulses • Requires laser prf <~1 kHz, requiring beam splitting for diode lasers which operate optimally at 6-10 kHz prf • Time-gated returns reduce background noise • PMT sensors typically have higher dark count noise Telescope and Sensor The Rayleigh lidar is being developed and tested at the Urbana Atmospheric Observatory (UAO) at Illinois. Once completed, the lidar will be tested at Magdalena Ridge Observatory (MRO), which has a large 2.4 m aperture telescope for improved signal in the receiver. The MRO site also has a lower background noise from the sky, which improves signal performance of the system. The optical design used at UAO is shown below, which includes the 36” Newtonian telescope and receiver optics. A narrow bandpass filter is used to block background (sky) radiance. The sensor used in the receiver will depend on the lidar configuration selected for this experiment. For a bistatic configuration, a CCD camera is used to take long exposures of the beam. In a monostatic configuration, Photomultiplier tubes are employed to capture time-gated returns of the transmitted laser pulses to get altitude-resolved measurements. Transmitter Phase Analysis Conclusion The simulations for this system indicate that this Rayeighlidar system is capable of measurements of the neutral atmosphere up to 125 km altitude at MRO. Once this experiment is successfully completed, this will be a step toward demonstrating that a large-aperture lidar observatory capable of measurements up to 200 km is achievable. The analysis of the lidar configurations show that the monostatic method is preferable, due to the significant noise contributions of secondary scattering in the bistatic configuration. This Rayleigh lidar development is underway at Illinois, with initial operation expected in the coming months. Acknowledgements Schematic of telescope and sensor optics at UAO 36” Telescope at UAO 2.4 m Telescope at MRO This work is supported by an NSF grant.