Download
1 / 1
10 likes | 166 Views
Local Compliance of Selected Arthropod Cuticle Measured by Atomic Force Microscopy Don Silver, Victor Fet, and David Neff; Marshall University Huntington, WV.

E N D
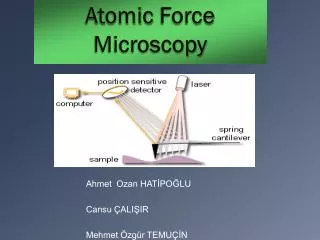
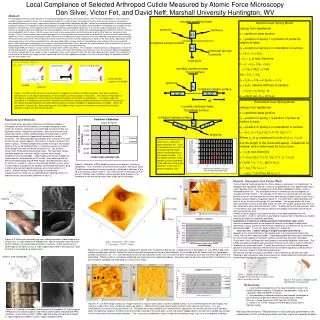
Local Compliance of Selected Arthropod Cuticle Measured by Atomic Force Microscopy Don Silver, Victor Fet, and David Neff; Marshall University Huntington, WV Abstract:The arthropod exoskeleton and integuments are composite biological materials consisting of fibrous chitin filements embedded in a matrix of proteins and other complex organic materials. This exoskeleton functions in a variety of ways from acting as the lens of the eye to serving as framework for force detector elements to serving as rigid skeletal elements making efficient locomotion possible. Traditional arthropod phylogeny is entirely based on exoskeletal features. Our laboratory studies the phylogeny of scorpions and our work with SEM (scanning electron microscopy) has revealed a variety of patterns and structures of the scorpion cuticle that have taxonomic and physiologic importance. In the current study, we attempt to extend our analysis of scorpion cuticle to the probing of its material properties. Previous work has shown that mechanical properties of different cuticular structures are correlated with their functions. For this reason, we chose to take measurements on the chela (claw) and the tail of Hadrurus arizonensis (fam. Iruridae). This is a frozen sample. Both of these body parts are multi-functional; consisting of cuticle associated with sensory structures and that which apparently serves a strictly musculoskeletal function. Relative local compliance of various cuticular areas were obtained using atomic force microscopy. The areas that we chose were ventral and dorsal surfaces of the the tail and the anterior and posterior surfaces of the claw (chela). Specifically, on the claw we will measure the cuticle associated with a newly described field of sensory structures (constellation array) and that of the non-associated cuticle. AFM (atomic force microscopy) has a vertical (z-axis) range of less then 10 μm. Because the cuticular surface of the scorpion tail has pits with depth greater than 100 μm the AFM probe placement is limited to locations between these pits. Contact mode AFM can measure surface variation or height within several nanometers. This resolution is obtained using a nulling process in which the vertical probe position is adjusted to zero the force of the surface on the point of the probe. The instrument scans the surface to obtain the topography of a chosen square patch of the sample surface. A single point in this area is chosen at which the tip is force down onto the surface. The compliance is a measure of the amount the sample surface is depressed due to the force applied to the probe. This force is determined by the deflection and force constant of the probe shaft. movable cantilever base Vertical Linear Spring Model change from equilibrium z = cantilever base position z1 = position of spring 1 or position of probe tip relative to base z2 = position of spring 2 or indentation of surface f1 = k1z1, f2 = k2z2 f = f1 = f2 at rest, therefore z = z1 + z2 = f1/k1 + f2/k2 = (1/k1+1/k2)f = (1/k)f 1/k = 1/k1 + 1/k2 z2 = f2/k2 = f1/k2 =z1(k1/k2) = z1/sr sr = k2/k1 (relative stiffness of sample) = z1/z2 = z1/(z-z1), or z1 = zsr/(1+sr), z2 = z/(1+sr) probe tip cantilever k1 compliant sample surface k2 molecular springs in sample fixed point position/feedback detector (top-bottom or z-error) laser imaging mode force sensinging mode movable cantilever base Tip on surface z-axis actuator (z-piezo or z-height) probe tip k1 sample cantilever probe tip compliant sample surface Figure 1. In AFM, as the tip moves the cantilever in response to variation in height of surface, laser beam intensity is measured at a multi-region light detector (in this example, top minus bottom is measured). The amount of movement of this spot is in proportion to the inverse of the angle of incidence of the beam on the detector.In imaging mode, the instrument is in feedback such that minor changes at the detector induce controlled withdrawl (or advance) of the tip from the surface thereby keeping it just skimming the surface as it rasters (feedback is depicted above in middle). When the instrument is measuring in force sensing mode, the feedback loop is broken and we measure directly the correlation between z height and signal at the detector. k2/2 k2/2 d Horizontal Linear Spring Model change from equilibrium z = cantilever base position z1 = position of spring 1 is position of probe tip relative to base z2 = position of spring 2 or indentation of surface f1 = k1z1, f2 = k2z2(√(z2’2+1)-1)/ √(z2’2+1) Where z2’ is z2 measured in units of d, z2’ = z2/d. d is the length of the horizontal spring. d depends on material and is determined by force curve. f1 = f2 at rest, therefore z1’ = srz2’(√(z2’2+1)-1)/ √(z2’2+1), z1’ = z1/d z’ (=z/d) = z1’ + z2’, plot z’ vs z1’ z1’ = srz2’2 for z2<< 1 = srz2’ = z’/(1+sr) for z2 >> 1 movable cantilever base Tip probing surface compliant sample surface Materials and Methods For this pilot study, we chose cuticle from two different classes of arthropods; we used the fixed portion of a scorpion pedipalp or claw (arachnid, Hadrurus arizonensis) we also tested the proximal tibia of a cockroach (insect, Periplaneta americana). Both structures consist of cuticle that serves a strictly skeletal purpose and local areas in which the exoskeleton serves as a specialized framework for sensory structures. The newly described constellation array is found on the claw of most (or all) scorpion species; its function is currently not known (Fet 2006, in press). The tibial campaniform sensilla make up a well studied sensory array on the cockroach leg. It is known to serve as a cuticular ‘strain guage’ that helps coordinate locomotion (2). The scorpion tissues were thawed after being stored frozen. The cockroach tissues had been preserved in ethanol (neither case are ideal storage conditions, fresh is preferable). AFM images and cuticular compliance measurements (force/distance or F/D curves) were obtained with the Pacific Nanotechnology NanoR AFM (Norton nanolaboratories at M.U.). Its maximum z range is <10um so only relatively smooth (or very small in area) regions of cuticle can be studied. AFM studies were done using a 450um long contact mode Si cantilever with a force constant of .2 nN/nm. Please note that in this pilot study, the compliance measurements on cuticle are un-calibrated thus indicating trends, not absolute values (see example calibration in figure 2). k1 k2/2 k2/2 probe tip Curves show movement of probe tip (z1) relative to base movement (z). Units of movement are in units of horizontal spring length used to model elasticity of the sample surface. sr is the relative stiffness of the sample surface compared to the stiffness of the probe cantilever or the ratio of spring constants, k2/k1. Figure 2. Calibration of AFM probe using silicon surface with virtually no compliance. Thus, movement of cantilever base (z-piezo) and tip are equal. The difference between forward and reverse is attributed to adhesion of the tip to extraneous surface material. This measurement is necessary so that we can ‘calibrate’ each cantilever, making possible data analysis in the framework of the two spring model seen at top right of the poster. Results, Discussion and Future WorkThe multi-spring model derived by Don Silver (above in yellow box) for compliance in a biological fiber composite material is certainly simplified but for a first approximation does seems describe the in vivo arrangement of chitin fibers embedded in protein matrix in arthropod skeleton (3). This arrangement varies in different tissues and appears to correlate with their function. For example, chitin fibers in muscle tendon are arranged parallel to the axis of force while those in less mechanically simple tissues usually have a complex, layered, helical arrangement (figure 7). The chitin fibers mentioned above are likely to act as the horizontal springs (k2) as modeled. The spring constant for these fibers (arranged as layers or bundles) would vary with the number, spacing and nature of their attachment sites within the cuticular matrix. To better define this phenomenon, Gorb (1) and others have used transmission electron micrographs to correlate ultra-structure with mechanical behavior. Another uncertain aspect of this type of analysis is the depth dependence of the measurements. Gorb (1) contrasts his quantitative measurements of hardness and elastic modulus by stating that hardness defined as: propensity of a material to undergo permanent deformation under stress metrics are dependent both on the superficial material (to the depth through which deformation occurs) and that material which underlies this to a distance of up to 10x the deformation depth. In contrast, elastic modulus (Y) defined as: force per area / relative change in length of compressed material depends on the entire thickness of the material and, in an assymetrical material like cuticle, will vary with indentation depth. These depth dependent phenomena could allow for sub-surface mapping of molecular networks unattainable with other techniques. Future work at M.U. will begin with more precise instrumental calibration techniques. The AFM’s (primarily an imaging tool) probe/scanner setup, by its nature, must be calibrated frequently (for each probe used). This can be contrasted to the well defined probe geometry and force calibration inherent to the nano-indenter apparatus used by Gorb (1) and in the work in figure 8 (http://www.hysitron.com). We feel that this type of analysis (with AFM or nano-indenter) could advance under-standing in both composite material science and our understanding of structural/functional (anatomical/physiological) correlations in animals. B. C. A. A. tibial cs tibia B. D. C. Figure 3. A. Drawing of cockroach leg (rear) showing location of tibial campaniform sensilla (cs). B. Light image of AFM probe over tibia of cockroach (note the small cluster of tibial cs at end of probe, white box), cantilever is 450 microns long. C. SEM image of the tibial cs array. D. High magnification SEM of one sensillum, each sensillum is innervated by a single neuron. z base movement (approaching sample) Figure 5. A. is an AFM image of 2 cockroach campaniform sensilla from the proximal tibial cluster (z-height channel in 3D display). B. is an AFM image of the cuticle surrounding the sensilla. Notice that while the sensilla themselves are found in 5um deep pits, the surrounding cuticle shows much less topographic contrast (hundreds of nm). In C. are force/distance curves from the points shown in B. This data has been truncated to show only the linear region of the F/D relationship. While this data is not properly calibrated (see discussion and model panel above), there does seem to be some local variation in compliance, we look forward to repeating and expanding our survey of this region. chela or claw of pedipalp C. A. B. A. C. Figure 7. Diagram showing a typical arrangement of chitin fibers in cuticle, arrow points to outside of animal. Figure 8. F/D curves of dragonfly cuticle collected with a nano-indenter. References:1. Local mechanical properties of the head articulation cuticle in the beetle Pachnoda marginata (Coleoptera, Scarabaeidae). Gorb, et.al. J Exp Biol. 2006 Feb;209(Pt 4):722-30.2. Force detection in cockroach walking reconsidered: discharges of proximal tibial campaniform sensilla when body load is altered.Zill et.al. J Comp Physiol [A]. 2001 Dec;187(10):769-84.3. Neville, A. C. (1975). Biology of the Arthropod Cuticle. Berlin: Springer Verlag. B. D. Figure 6. A. is an AFM image (z-piezo or z-height channel) of scorpion claw cuticle, note the ‘pebbled’ surface. B. is an AFM image of the same region, this image is a map of the z-error or detector signal (see figure 1). Notice that the cuticle shows height variation on the order of one micron). In C. are force/distance curves from the points shown in A. This data has not been edited thus, it shows the tip’s approach to the surface (flat lines in pink and blue plots), the adhesive attraction as the tip nears the surface (initial dip in the same plots), and in the case of hadpp6 (brown) we see that our probe was already on the surface when we started data collection. The x-axis here is calibrated to actual z-height of the cantilever base; the y-axis is not properly calibrated. Figure 4. A. Drawing of a scorpion showing claw of the pedipalp. B. Light image of AFM probe over claw of scorpion (note the box defining area analyzed with AFM), cantilever is 450 microns long. C. SEM image of the claw, dorsal/anterior aspect. D. High magnification SEM of cuticle in region studied by AFM. We would like to thank Dr. Michael Norton for his continuing commitment to the maintenance of M.U. microscopy facilities and their use by all interested students