Download
1 / 21
220 likes | 418 Views
High-speed Pressure Sensor Grid for Humanoid Robot Foot. Y. Takahashi, K. Nishiwaki, S.Kagami, H. Mizoguchi, H. Inoue Digital Human Research Center National Institute of Advanced Industrial Science and Technology 2-41-6, Aomi, Koto-ku, 135–0064, Japan youhei-takahashi@aist.go.jp. PPT 製作 100%.

E N D
High-speed Pressure Sensor Grid for Humanoid Robot Foot Y. Takahashi, K. Nishiwaki, S.Kagami, H. Mizoguchi, H. Inoue Digital Human Research Center National Institute of Advanced Industrial Science and Technology 2-41-6, Aomi, Koto-ku, 135–0064, Japan youhei-takahashi@aist.go.jp PPT製作100% Student ID : M9920103 Student : Kun-Hong Lee Adviser :Ming-Yuan Shieh
Outline ABSTRACT INTRODUCTION SCANNING CIRCUIT THIN FORCE SENSING RUBBER SCAN METHOD IN THIS SYSTEM EXPERIMENT CONCLUSION References
ABSTRACT This paper describes a 32 × 32 matrix scan type high-speed pressure sensor for the feet of humanoid robots that has 1[kHz] sampling rate. This sensor has matrix scan circuit. We adopted very thin(0.6[mm]) force sensing conductive rubber sheet for high speed sensing. Each sensing area is 4.2 × 7.0[mm] and can measure vertical force of approximately 0.25– 20[N]. Walking cycle of humanoid robot as well as human being is about 0.4–0.8[s] and dual leg phase is about 0.1–0.15[s]. The target of the sensor is biped walk stabilization so that highspeed input is important.
INTRODUCTION(1/3) Fig. 1. Humanoid robot H7
INTRODUCTION(2/3) However, on uneven surface tactile information is becoming important to control landing shock absorption and balance control. We are working on a footstep planning technique on uneven surface[1], but it is also vital to achieve by real sensor and control system. We developed a high-speed distributed force sensor with very thin (0.6mm) force sensing conductive rubber. The sensor system is equipped with AD converters both on the column lines and row lines of the sensor electrode part.
INTRODUCTION(3/3) The system runs about 1[kHz] with 14bits resolution at 4.2 × 7.0[mm] grid for 32 × 32 points. Whole sensor area is same as sole of H7 humanoid 135 × 228[mm]. This sensor element is classical key matrix scan sensor, but has 1[kHz] sampling rate which is the same as the lowest software control cycle of our H7 humanoid robot system.
SCANNING CIRCUIT(1/3) We use analog switch for current supply one by one, and read output voltage with additional voltage following op-amp. Therefore, there are 32 analog switch and ADC Control flow is as follows: One analog switch becomes “High” and after fixed weight time (default is 3.1[us]) column and row lines voltage simultaneously read the voltages of each line. It repeats until 32 analog switch lines becomes “High” once. Then row lines data matrix(32×32, 2[kB]) and column lines data matrix(32 × 32, 2[kB]), two matrixes data is transmitted to the control PC.
SCANNING CIRCUIT(2/3) Fig. 5. Sensor control cuicuit. USB2.0 link send force image by 1[kHz] Fig. 3. Electrode part of the sensor. Developed system is shown in Fig. 3 and Fig. 5.
SCANNING CIRCUIT(3/3) Fig. 4. Sensor grid size. Each sensing area is 4.2 × 7.0[mm]. Electrodes which are shown in Fig. 4 are arranged in the shape of a grid.
THIN FORCE SENSING RUBBER(1/2) TABLE 1 FORCE SENSING RUBBER RESISTER Fig. 6. Force - resistance curve
THIN FORCE SENSING RUBBER(2/2) Fig. 7. Relationship from load and measured voltage
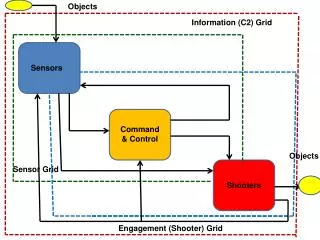
SCAN METHOD IN THIS SYSTEM(1/3) The system in this paper is equipped AD converters both on the column lines and row lines of the sensor matrix(Fig. 8). Fig. 8. Pressure sensor circuit diagram. (Example 3x3 matrix)
SCAN METHOD IN THIS SYSTEM(2/3) As shown in a Fig. 8, when the colum line 1 is applied the voltage, the following formula is led from Kirchhoff’s current rule at the top row:
SCAN METHOD IN THIS SYSTEM(3/3) Value of resistance is found by taking the reciprocal of each element of vector .
EXPERIMENT(1/5) Fig. 9. Sylinder applies static pressure to the sensor A. Experiment of static pressure Static pressure was applied to the sensor. A cylinder (Diameter: 20[mm] Weight: 1[kg]) was put on the electrode unit. The scanning rate was set to 300[Hz]. The experimental result is shown in Fig. 9. The pressure was applied to the electrode part with conductive rubber on the floor by human foot.
EXPERIMENT(2/5) Fig. 10. ADC data foot print (normal) The pressure was applied to the electrode part with conductive rubber on the floor by human foot. A subject(male, weight:65kg, foot size:27cm) stood on the sensor. By usual matrix scan method, the voltage of row lines is shown in a Fig. 10. The right side of a Fig. 10 is a toe and left is the heel.
EXPERIMENT(3/5) Fig. 11. Foot print with this method Although there is no pressure in fact, there are points which seem to have impressed pressure(for example arch of a foot). Fig. 11 shows a calculation result using the method in this paper. The interference at each point is suppressed by this method.
EXPERIMENT(4/5) Experiment of dynamic pressure As the dynamic pressure, the subject(male, weight:65kg, foot size:27cm) run on the sensor. Scanning rate was 300[Hz]. The result is shown in Fig. 12, it shows the relative time from first frame. There is almost no delay of the viscoelastic response of rubber, because of very thin conductive rubber and simultaneous measurement. Interference at each point is suppressed also to dynamic pressure by this method.
EXPERIMENT(5/5) Fig. 12. Dinamic pressure is applied to the sensor unit using human foot
CONCLUSION Matrix scan is achieved with a novel method. Resistance at each sensing point is calculated by solving the simultaneous equations from column and row lines voltage. Interference by bypass current is suppressed by this method. The high-speed(1[kHz]) sensor was realized by measuring voltage simultaneously and thin(0.6[mm]) force sensing conductive rubber. Distributed pressure was successfully measured. In the future, we will use this sensor for foot landing force absorption and balance control of our humanoid robot.
REFERENCES [1] Joel Chestnut, James J. Kuffner, Koichi Nishiwaki, and Satoshi Kagami.Planning biped navigation strategies in complex environments. In IEEEInternational Conference on Humanoid Robots (Humanoids2003), 10 2003. [2] Satoshi Kagami, Masaaki Mochimaru, Yoshihiro Ehara, Natsuki Miyata,Koichi Nishiwaki, Hirochika Inoue, and Takeo Kanade. Measurementand comparison of humanoid h7 walking with human being. In IEEEInternational Conference on Humanoid Robots (Humanoids2003), 10 2003. [3] Makoto Shimojo, Masatoshi Ishikawa and Kikuo Kanaya. A Flexible High Resolution Tactile Imager with Video Signal Output. In IEEE International Conference Robotics and Automation , pp.384-391 1991.4.9-11 [4] W. E. Snyder and J. ST. Clair. Conductive Elastomers as Sensor for Industrial Parts Handling Equipment. In IEEE Trans. Instrumentation and Measurement , IM-27-1 pp. 94-99 1978. [5] J. A. Pubrick. A Force Transducer Enploying Conductive Silicone Rubber. In Proceeding 1st Conference on Robot Vision and Sensory Controls , pp. 73-77 1981. [6] S. Kagami, Y. Takahashi, K. Nishiwaki, M. Mochimaru and H.Mizoguchi. High-speed Matrix Pressure Sensor for Humanoid Robot by using Thin Force Sensing Resistance Rubber Sheet. In Proceeding of International Conference IEEE Sensors ,2004. [7] Masatoshi Ishikawa and Makoto Shimojo. An Imaging Tactile Sensor with Video Output and Tactile Image Processing. In The Society of Instrument and Control Engineers , Vol.24, no.7, pp. 662-669 1988 (in Japanese). [8] W. D. Hills. A high-resolution image touch sensor. In International Journal Robotics Research , Vol.1, no.2 pp. 33-44 1982. [9] Genichiro Kinoshita, Tomonori Kimura, and Makoto Shimojo Dynamic Sensing Experiments of Reaction Force Distributions on the Sole of a Walking Humanoid Robot. In Proceeding of the 2003 IEEE/RSJ Intl.Conference on Intelligent Robots and Systems ,10 2003.