Electrical Apprenticeship. Phase 4.
Electrical Apprenticeship. Phase 4. Module 4.1.4. Three Phase Induction Motors Principles of 3 phase Rotating Fields. Rotor Induced E.M.F. Current and Torque Developed. Low resistance rotor. Double cage and wound rotor. Rotor Slip. Factors Affecting Torque. Conditions of maximum torque.

Electrical Apprenticeship. Phase 4.
E N D
Presentation Transcript
Electrical Apprenticeship.Phase 4. • Module 4.1.4. Three Phase Induction Motors • Principles of 3 phase Rotating Fields. • Rotor Induced E.M.F. Current and Torque Developed. • Low resistance rotor. Double cage and wound rotor. • Rotor Slip. • Factors Affecting Torque. • Conditions of maximum torque. Electrical Science
Comparison of starting currents and torques for: • Direct on line starting. • Star-delta starting. • Rotor resistance starting. • Reversal of direction of a rotating magnetic field. • Efficiency, losses and power factor. Electrical Science
Material used in construction of motors. • Construction of axial and thrust bearings • Ball, roller sleeve, • Methods of cooling. Internal and external fans. • Effect of heat on windings. • Motor selection: • Size and ratings, environmental conditions, (IP ratings.) • Ratings and types of circuit protection. • Overloads, fuses, circuit breakers. Electrical Science
Current Flowing through a Wire Creates a magnetic field around the wire. Electrical Science
The Lines of force have a direction that depends on the direction of the current. Electrical Science
How a motor rotates. Electrical Science
Where Three Phase Induction Motors are used • They are used in the majority of applications where a power rating of more than 5 horse power is required. • Pumps. • Fans. • Compressors. • Grinders Electrical Science
The Rotor: is the part that ROTATES.It is not connected to any supply.The Stator: stay still.It has the three phase windings.Does current flow in the rotor? Stator. Rotor is like a Cage Electrical Science
Rotor Induced E.M.F. • When current flows in the stator coils it creates a magnetic that induces current into the rotor. • That is why it is called an INDUCTION Motor. • The current in the rotor creates it’s own magnetic field. • The two magnetic fields field cause the rotational force we call TORQUE. Electrical Science
The three phase coils in the stator create a magnetic field. • If the coils are fed with a 50 Hz supply the stator field turns 50 times a second. • This is called the synchronous speed. • But the rotor (the motor) does not go this fast. yellow Red N Invisible rotating magnetic field or magnet. Has two poles. One is called North, and the other South. Blue Blue These are the stator coils. They do not move. S yellow Red Electrical Science
The speed of Invisible magnet iscalled the synchronous speed.The motor itself cannot go this fast. Electrical Science
Examples • Calculate the synchronous speed of a six pole machine fed from a 50 Hz supply. Give your answer in revolutions per minute. 2) Calculate the number of poles on a stator giving a synchronous speed of 300 r.p.m. if it is fed from a 60 Hz supply. Electrical Science
Solution 1 Electrical Science
Solution 2 Electrical Science
Rotor Slip • An Induction motor must have slip. • The rotor (motor) goes slower than the synchronous speed. Electrical Science
Example Questions. • Q1 A two pole 50 Hz three pole induction motor runs at 2850 r/min. • Calculate the per unit slip and the percentage slip. • Q2. A four pole 50 Hz three pole induction motor has a per unit slip of 0.03 on full load. Calculate the full load speed. Electrical Science
Solution 1 Electrical Science
Solution 2 Electrical Science
Slip changes the EMF induces in the Rotor. • Rotor E.M.F. = s . Eo • If the rotor is stationary the fractional slip =1. • All the available E.M.F. induced. • If Eo is the E.M.F. from the stator • Rotor E.M.F. = 1 . Eo • Rotor E.M.F. = Eo • If the rotor is moving at the same speed as the stator field (synchronous speed) the slip is zero. • Rotor E.M.F. = 1 . Eo • Rotor E.M.F. = 0. Electrical Science
Slip changes the frequency of the voltage induces in the Rotor. • Rotor E.M.F. = s . f • If the rotor is stationary the fractional slip =1. • If f is the frequency of the voltage supply to the stator • Rotor frequency (slip frequency) = 1 . f • Rotor frequency (slip frequency) = f • If the rotor is moving at the same speed as the stator field (synchronous speed) the slip is zero. • Rotor frequency (slip frequency) = 0 . f • Rotor frequency (slip frequency) = 0 Electrical Science
Two Types of Rotor 1) Wound Rotor. 2) Cage Rotor. Electrical Science
Torque changes with Speed torque Starting torque. 0 Max speed speed As the motor goes faster the torque increase. But as the speed hits maximum the torque collapses. Electrical Science
Torque changes with Slip torque Starting torque. 100 Slip % No slip But as the speed of the rotor approaches the speed of the stator the slip approaches zero. So no E.M.F. Is induced so the torque collapses. Electrical Science
Improving Torque • We would prefer to have a motor with the same turning power (torque) regardless of speed. • We do it by using two cages. • Diagram of Ideal Torque. Torque stays at the same level. Torque Speed of motor increasing Electrical Science
Torque With Two Caged Rotor. Now torque is high all the time Inner Cage (Low Resistance) Starting torque. Outer Cage (High Resistance) 100 Slip % No slip speed Electrical Science
Factors affecting Torque • Torque Increases with • Current. • Flux. Electrical Science
Maximum Torque • Starting torque is also called stall torque. • Maximum torque is also called pull-put torque. • Maximum Torque occurs when the rotor reactance equals rotor resistance. Electrical Science
Starting Induction Motors • Starting a bicycle takes extra force. • Starting a car requires 1st gear. • Starting a motor draws extra current. • Induction motors are self starting. • But starters are used to do two things. • Provide safety cut off in case the power comes back on. If the power fails the motor stops. But when the power comes back on the motor should not start by itself. This is for safety and because there may be a short circuit in the motor. • 2) The starter must also reduce the motors starting current and the time for which it flows. Electrical Science
4 Types of Starters • Direct on Line. • Star Delta. • Autotransformers. • Rotor Resistant. 1)Direct on Line: Used on small machines so it does not need to limit the current. It is simply a switch that connects the three phase supply to the motor. It has overload and ‘no volt’ protection and many types must have the stop button pressed before restarting. The connection is Delta type. Electrical Science
2) Star Delta Starters • The motor is started in Star formation but once the motor is running the connection is switched to Delta formation. • Star mode uses one third the current, but only one third the power is delivered. • Used in machines of about 25 kW, where slow start up is acceptable. • Overload and no load protection are also provided. Electrical Science
3 )Autotransformer Starters • A transformer can have one current on the primary and a lower current on the secondary. • An autotransformer uses one winding which is used as primary and secondary, to keep it’s size small. • Once the motor is running the autotransformer is switched out.. • Advantage: • Provides desired starting current and torque. Disadvantages: Expensive. Bulky. Electrical Science
4) Rotor Resistance Starters • Not all induction motors use cages as rotors. • Some large motors use windings in the rotor. • These are powered by star connected by a slip ring on the shaft. • Resistance is added while starting the motor to reduce the current. • This improves the power factor and so the starting torque. • The speed of the motor can be controlled by adjusting the series resistance. But consuming power across a resistor is a waste of power. Electrical Science
One of the 3 Rotor coils. Placing the resistor in series with the rotor coils means less current is drawn. Speed can be controlled this way too. Disadvantage: Power is wasted. Electrical Science
Reversal of Direction of Rotating Magnetic Field N S The red phase is causing the magnet to rotate at present. Then the yellow then the blue. What would happen if any two of the three stator connections are changed over ? ( I,e, if blue and red were swapped.) Electrical Science
Problems with three phase induction motors . SINGLE PHASING. • Sometimes one coil can become disconnected. The motor will rotate but not perform correctly. • This is called SINGLE PHASING. Electrical Science
Typical Exam Question • State two advantage of wound-rotor three phase induction motors compared to squirrel cage. • Solution: An external resistance can be added and this: • Reduces starting current. • Increases starting torque. Electrical Science
Typical Exam Question • What is the voltage across each winding of a three phase induction motor when it is started in star mode? • Solution: • Across each winding the voltage is Electrical Science
Motor Efficiency Electrical Science
Two Type of Power Loss • 1) Electrical Losses. • Copper Losses. • Iron Core Losses • Eddie Current Loss. • Hysteresis Loss • 2) Mechanical Losses • Friction. • Winding Loss. Electrical Science
Copper Losses. Most coils used in motors are made from copper. A perfect coil has no resistance and wastes no power. But: We are unable to make copper coils that have zero resistance. The current flowing through the copper wire coil heats the wire and the electrical power is lost as heat. Electrical Science
Copper Losses are measured in watts. Electrical Science
Eddie Current Loss. • An eddy is like a whirlpool in a river. • It flows against the general current. • Eddy currents are caused by E.M.F. ( electromotive force or voltage) induced into the iron core. • This voltage causes unwanted currents to flow in the iron. • The current causes power losses in the iron. Again: • Watts = V.I. Electrical Science
Hysteresis Loss • A Magnetising force created by the current is used to create flux in the iron core of a coil in a motor. • As the current alternates the magnetising force also changes direction. • The new flux is in the opposite direction . • The two flux fields oppose each other. • This wastes of power is called hysteresis loss. Electrical Science
Reducing Eddy Currents and Hysteresis Loss There is insulating paper between each slice of Iron. The Iron Core is Laminated (Sliced): The iron is in slices so the current has nowhere to flow. Less current means less loss. Electrical Science
Reducing Eddy Currents and Hysteresis Loss • These losses depend on the currents flowing in the iron core. • They do not occur in air. • Different materials will produce different losses. Electrical Science
Friction Losses • As The motor rotates the bearings rub against the shaft and slow down the machine. • If the motor has a commutator it also causes friction. Winding Losses Motor windings are bulky. As the rotate the air resists their movement and slow down the motor. Electrical Science
Friction and Winding Losses Bearings rub against the shaft. Large coil must push the air Out of the way. Electrical Science
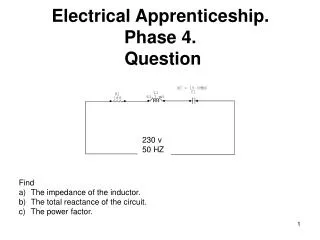
Question • 3 coils of a motor each have 10 ohms impedance. • The three phase supply is 415V. • If connected in Star Mode find: • The Line voltage. • The Phase voltage. • The Line current. • The phase current. Electrical Science