Download
1 / 28
280 likes | 386 Views
Time Evolution of Risk COLA. Vaš Majer Integral Systems, Inc AIAA Space Operations Workshop 15-16 April 2008 9/26/2014 12:01 PM. Introduction. Hello. Agenda. OASYS COLA Risk Analysis Drift-By Scenario On-Station [Home] Drifting [Visitor] Time Evolution of Separation Risk. COLA.

E N D
Time Evolution of Risk COLA Vaš Majer Integral Systems, Inc AIAA Space Operations Workshop 15-16 April 2008 9/26/2014 12:01 PM
Introduction Hello
Agenda • OASYS COLA Risk Analysis • Drift-By Scenario • On-Station [Home] • Drifting [Visitor] • Time Evolution of • Separation • Risk
COLA OASYS Collision Risk Assessment
Given • t → u(t) = y(t) – x(t) • 3D Separation Vector Ephemeris • Vehicle Y with Respect to Vehicle X • u=0: Vehicle Y @ Vehicle X Center of Mass • t → R(t) • 3D Joint Uncertainty Covariance Ephemeris
The Scenario u Separation Estimate R Covariance of Estimator d Radius of Hard Body Stay-Out Sphere, S z = (x,y) Any Trial Vector TRUTH, z=Z, is, As Always, Nowhere to be Seen, FixedBut Unknown
The Definition • Collision • TRUTH, Z, is Inside Stay-Out Sphere S
The Objective • Quantify Risk of Collision • For Estimators, t →u(t), t T • In View of Uncertainty, R(t) • In View of Stay-Out Sphere, S • With a Scalar Function, t →r(t)
Attributes of Risk Statistic, r • 0 < r ≤ 1 • r = 0 Lowest Possible Risk • r = 1 Highest Possible Risk • r is Conservative • r is Robust
Conservative • Because Estimator, u... • Is Biased Relative to Truth, Z • Bias u-Z is Unknown • And Because Estimator Covariance, R... • Should be Centered on Truth, Z, which is Unknown • Is Notoriously Optimistic [Small] • Under-States Variance/Uncertainty • We Want Risk Statistic, r, Such That... • r is Upper Bound on Risk • r Threshold Levels Have MeaningIndependent of Scenario Geometry • r > 0; Risk Never Sleeps • r = 1 OK; Extreme Risk Deserves Notice
Robust • r Conforms to Intuitive Notion of Risk • r increases as |u| decreases • r increases as |R| increases • r increases as d increases • r is Sensible for Limiting Scenarios • u in S implies r = 1 • u near S implies r ~ 1 • r makes sense even for d=0
Risk of Collision, rC OASYS™ COLA Statistic
Risk of Collision, rC • if (0 ≤ |u| ≤ d) rC = 1; • else v = d (u/|u|); V = {z | J(z; v,R) < J(u; v,R)} q = ∫V dp(z; v,R) rC = 1 – q;
Risk of Collision Heuristic • Make the NULL Hypothesis: • u is a Trial Estimator of Truth Z=v, where • v = d (u/|u|); d = radius of S; and • Trial Estimators are z ~ Gauss(v,R) • v is the Point in S which is Closest to Estimator u • V is the (v,R) Metric Sphere of Radius |R-1/2(u-v)| Centered at v • Estimator u is on the Boundary of V • q is • the Probability Measure of the (v,R)-Sphere, V • the Probability that a Random Trial Estimator of Z=v Lies in V • rC = 1-q is • the Probability Measure of the Complement of V • an Upper Bound on the Probability that the NULL Hypothesis is TRUE
GEO Drift-By • SatX [HEX] on GEO Station • COV Epoch @ t=0 • SatY [WHY] in GEO Drift-By • COV Epoch @ t = 0 • Close Approach to HEX @ t ~ 10 hours
COLA Analysis Controls • Hard-Body Sphere Around HEX • 100 m • Alarm Levels
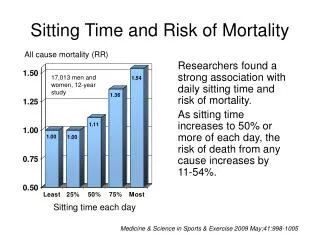
Common Risks KSI: Killed or Seriously Injured
Common GEO Separations : micros, 1e-6
Time Evolution COLA 10 Day Span Centered on COV Epoch @ t=0
Discussion of Separation • Near Linear Approach and Departure • Clear Point of CAP @ t ~ 10 hours • Alarm Level sepYEL=100 km Active • Alarm Level sepRED= 10 km InActive • sepMIN=10.023 km > sepRED = 10 km • Looks Safe Enough...
Discussion of Risk • log10(1) = 0 • Periodic rskMAX ~= 1 • 12 hour Period • Risk Alarms Triggered • Well Before and Well After CAP • Risk Alarm Level Transitions Closely Spaced • High Risk Levels Despite Large Separations • COV Epochs @ t=0 • Uncertainty Grows Forward/Backward in Time • In Real Life... • COV Epochs are Many Revs Prior to CAP • Growth of Uncertainty is Significant
Discussion of Metrics • The Whole Story Encapsulated • H ~ Squared Separation [cyan] • J ~ ChiSquared Separation [blue] • Minima of H ~ Minima of Separation • Apparently Benign Alarm Levels • Minima of J ~ Maxima of Risk • Alarm Levels Triggered Well in Advance • Risk Maxima Identified
Summary • Useful • COL Risk Analysis • CAP Separation Analysis • Complementary Views of Close Encounter • Essential • Time Evolution Study of Risk/Separation • Acknowledge Growth of Uncertainty with Time • Myopic and Even Dangerous • Restrict COLA to Times of CAP • Restrict COLA to 2D Relative Velocity