Download
1 / 32
320 likes | 460 Views
Graphs. David Johnson. Describing the Environment. How do you tell a person/robot how to get somewhere ? Tell me how to get to the student services building…. World Representation. Landmarks Paths/Roads Map This is abstracted as a graph Not in the sense of a plot. Graphs.

E N D
Graphs David Johnson
Describing the Environment • How do you tell a person/robot how to get somewhere? • Tell me how to get to the student services building…
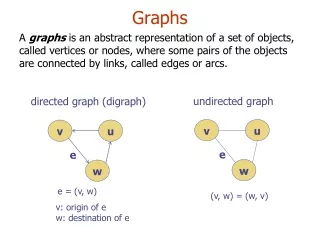
World Representation • Landmarks • Paths/Roads • Map • This is abstracted as a graph • Not in the sense of a plot
Graphs • A graph is a set of landmarks and the paths between them • A graph G has • Set of vertices (or nodes) V • Set of edges E • A graph is a classic data structure in CS V1 E1 V2 E2 V3
Graphs • A directed graph means • E(A,B) does not imply E(B,A) • What kind of robot would need a graph that is not bidirectional? • Edges may have weights • Where would this be appropriate? V1 E1 1.4 V2 2.6 E2 V3
Paths • A path is a sequence of vertices such that for Vi and Vi+1 Ei,i+1 exists • A graph is connected if there is a path between all V • For what kind of robot and environment would this not be true? V1 E1 1.4 V2 2.6 E2 V3
Imagine a simple robot • What is the simplest kind of robot you can think of?
Point Robots • A point robot can move along the infinitesimal width edges of a graph. • Path planning for this simple case is just searching a graph for a path.
Finding Paths • Given a start and end, how do we find a path between them? V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Depth First Search (DFS) • Always take the first option V1 V1 V3 V7 V8 V2 V4 V6 V5
Breadth First Search (BFS) • Exhaust all possibilities at same level first V1 V1 V3 V7 V8 V2 V4 V6 V5
Breadth First Search (BFS) • Exhaust all possibilities at same level first V1 V1 V3 V7 V8 V2 V4 V6 V5
Breadth First Search (BFS) • Exhaust all possibilities at same level first V1 V1 V3 V7 V8 V2 V4 V6 V5
Breadth First Search (BFS) • Exhaust all possibilities at same level first V1 V1 V3 V7 V8 V2 V4 V6 V5
Wavefront planner • Use BFS on a grid • Label cells with values • Start with zero • Expand from start • Add +1 to neighbors of current wavefront • Use gradient descent to search from goal to start
Representations: A Grid • Distance is reduced to discrete steps • For simplicity, we’ll assume distance is uniform • Direction is now limited from one adjacent cell to another
Representations: Connectivity • 8-Point Connectivity • (chessboard metric) • 4-Point Connectivity • (Manhattan metric)
The Wavefront in Action (Part 1) • Starting with the goal, set all adjacent cells with “0” to the current cell + 1 • 4-Point Connectivity or 8-Point Connectivity? • Your Choice. We’ll use 8-Point Connectivity in our example
The Wavefront in Action (Part 2) • Now repeat with the modified cells • This will be repeated until goal is reached • 0’s will only remain when regions are unreachable
The Wavefront in Action (Part 3) • Repeat again...
The Wavefront in Action (Part 4) • And again...
The Wavefront in Action (Part 5) • And again until...
The Wavefront in Action (Done) • You’re done
The Wavefront • To find the shortest path simply always move toward a cell with a lower number • The numbers generated by the Wavefront planner are roughly proportional to their distance from the goal Two possible shortest paths shown