Advanced Research on Agent-Based Distributed Planning and Scheduling at University of Girona
100 likes | 207 Views
The eXiT research group at the University of Girona specializes in agent-based distributed planning and scheduling. Engaging with methodologies such as case-based diagnosis and multivariate statistical process control, the group focuses on domains including chemical processes, wastewater treatment, electric distribution systems, and more. Leveraging innovations in remote laboratories and collaborative platforms, the research aims to enhance resource allocation in diverse environments, from rescue operations to industrial applications. For more information, visit http://exit.udg.es.

Advanced Research on Agent-Based Distributed Planning and Scheduling at University of Girona
E N D
Presentation Transcript
eXiT research group University of Girona Research line on agent-based distributed planning and scheduling
eXiT Institutional Framework • Teachers and students belong to the Departament d'Electrònica Informàtica i Automàtica (ISA+ATC) • IT Doctoral program (Dept. EIA / IGSOC) • Research activity is developed in the Institut d'Informàtica i Aplicacions • Innovation: EASY Center (CIDEM/X-IT network)
Scope and research lines eXiT group develops an active research in the field of process supervision with emphasis in the integration of methods and techniques to assess process behaviour from measurements and experience reuse based on the following main points: • Case Based Diagnosis • Multivariate statistical process control • Qualitative representation of trends • Knowledge discovering in data bases for situation assessment • Agent-based distributed planning and scheduling • Remote and virtual laboratories. Domains: • Chemical and petrochemical process (European project) • Waste water treatment plants (MEC projects) • Electric Distribution System (Power Quality) (Innovation) • Electronic Circuits • Road transportation: passenger, ambulances. • Pilot plant webCam
Membership • PhD: • Joan Colomer • Joaquim Meléndez • Carles Pous • Beatriz López • Sergi Herraiz • Dídac Busquest (Ramón y Cajal, from April 1st, 2006) • PhD students wiht MsCThesis (DEA): • Juan José Mora • David Llanos • Magda L. Ruiz O • Bianca Innocenti • Francisco I. Gamero • Daniel A. Macaya • PhD students: • Montse Rubio • Pere Urra • Víctor Muñoz • Other university staff: • Josep Xargayó • Orlando Contreras Arlab Silvia Suárez Dept. IMA Josep M. Humet Miquel Bofill Mateu Villaret Others Miquel Muntaner
Agent-based distributed planning and scheduling Motivation (history): • Resource allocation in rescue environments • Resource allocation in industries • Research on robot architectures and distributed control Domains: • Rescue environment (MEC project, UPV, URV) • Animal food productions (Innovation ?) • Cutting (Innovation) • Road transportation: • Passenger (Innovation, MEC project, UPV) • Ambulance coordination (J.Trueta Hospital) • Seat allocation in massive events (Innovation) • Surveillance (MEC project)
Task and resource allocation in distributed environments • MARKET MECHANISMS • COMBINATORIAL AUCTIONS • Re-scheduling • Biding policies • MAGNET (John Collins,USA) • Robocup Rescue PhD Student: Silvia Suárez Supervisor: Beatriz López, Josep Lluis de la Rosa
Distributed scheduling based on multi-agent systems • DISTRIBUTED CONSTRAINT SATISFACTION • MARKET MECHANISMS • COMBINATORIAL AUCTIONS. PhD Student: Pere Urra Supervisor: Beatriz López PhD Student: Víctor Muñoz Supervisor: [Beatriz López], Didac Busquets
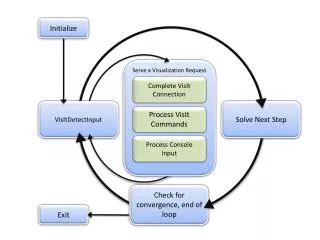
Multi-Agent Deliberative System Applied to Control a Single Robot • Multi-Agent Systems • Planning merge • Task Planning • Distributed Robot Control PhD Student: Bianca Innocenti Supervisor: Beatriz López, Joaquim Salvi
Thank you ! University of Girona http://exit.udg.esblopez@eia.udg.es