Course
Course. 自动控制原理. Any comments, please feel free to contact me ( 中心楼 617 , Tel.: 83792418 (o)). 1 )足以描述系统全部运动的含义:只要确定了这组变量在某一初始时刻 的值,并且确定了从这一初始时刻起( )的输入量函数,则对象的全部变量在此刻和 ( )的运动都唯一确定了。. 第 3 章 控制系统的状态空间模型. 3.1 状态与状态空间. 一、状态的定义.

Course
E N D
Presentation Transcript
Course 自动控制原理 Any comments, please feel free to contact me (中心楼617, Tel.:83792418(o))
1)足以描述系统全部运动的含义:只要确定了这组变量在某一初始时刻 的值,并且确定了从这一初始时刻起( )的输入量函数,则对象的全部变量在此刻和 ( )的运动都唯一确定了。 第3章 控制系统的状态空间模型 3.1 状态与状态空间 一、状态的定义 1、定义 所谓系统状态,是指在描述对象运动的所有变量中,必定可以找到数目最小的一组变量,它们足以描述对象的全部运动。 状态变量: 该变量组中的每个变量称为状态变量。 2、有关定义的两点说明
若一个系统有n个状态变量: ,用这n个状态变量作为分量所构成的向量 ,就称为该系统的状态向量,用 表示。 2)数目最小的含义:是指这个变量组中的每个变量都是相互独立的。 二、状态向量
输入向量:将系统的各个输入量看成一个列向量 。 三、状态空间 状态空间:所有n维状态向量的全体便构成了实数域上的n维状态空间。 状态轨迹:在状态空间中,时间t是一个参变量,某一时间t的状态是状态 空间中的一个点,而一段时间下状态的集合称为系统在这一时间段的状态轨迹,有时也称作相轨迹。 四、输入向量和输出向量 m: 输入量的个数
输出向量:将系统的各个输出量看成一个列向量 。 :输出量的个数
1、系统状态变量的选取不是唯一的,但状态的数目是一定的;1、系统状态变量的选取不是唯一的,但状态的数目是一定的; 2、系统的状态的和系统的输出是两个不同的概念。 系统的输出通常有明确的物理含义,是可以测量的; 系统的状态不一定有物理含义,不一定可以测量; 在线性系统中,输出是系统状态变量中某一个或某几个的线性组合。
3.2 状态方程与输出方程 一、状态方程 1、状态方程的定义 所谓状态方程,就是描述系统的状态之间以及输入和状态之间的动态关系的一阶微分方程组。 2、状态方程的标准形式
向量矩阵形式为 n×1维的状态向量
维的函数向量 m×1维的输入向量
维的系数矩阵 向量矩阵形式为
二、输出方程 1、输出方程的定义 所谓输出方程,就是描述系统输出量与状态和输入量之间相互关系的代数方程组。 2、输出方程的标准形式
维的函数向量 维的输出向量 向量矩阵形式为
维的系数矩阵 维的系数矩阵 向量矩阵形式为
三、状态空间表达式(状态空间模型) 线性定常系统的状态空间模型:将状态方程和输出方程合在一起,即 或
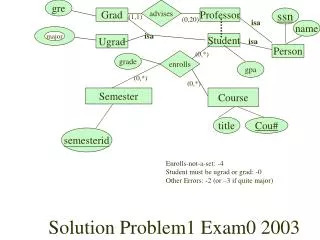
Y(s) U(s) G(s) 状 态 方 程 输 出 方 程 四、状态空间模型与传递函数的比较 传递函数只能描述系统外部的输入输出关系,并不能反映系统内部状态的变化,我们称之为外部描述。 状态空间模型将输入输出间的信息传递分为两段来描述。第一段是输入引起系统内部状态发生变化,用状态方程描述;第二段是系统内部的状态变化引起系统输出的变化,用输出方程描述。由此可见,状态空间模型在一定程度上描述了系统内部变量的变化,所以我们称之为内部描述。
较之传递函数,状态空间模型的优点有: (1) 可以方便地描述多输入—多输出系统; (2) 由前面的分析可以看出,对于不同维数的系统,可以采用同一表达方式来进行描述,由此可见从低维系统得到的结论可以方便地推广到高维系统,只是计算复杂一些而已。 (3) 状态空间模型是一种时域分析方法,可用计算机直接在时域中进行数值计算。 五、状态空间模型的结构图(p.93图3.3)
假设 和 是我们为某一系统选定的两组不同状态变量, 和 之间有一一对应的变换关系即可逆变换关系,对于线性系统而言,这种关系就是 线性非奇异变换,既 与 之间必有关系 其中 为非奇异常数矩阵 设以 为状态向量时系统的状态空间模型为 六、状态空间模型的非唯一性
而以 为状态向量时系统的状态空间模型为 下面我们来推导两者之间的对应关系。
表明,在同一系统中,不同的状态向量所对应的系数矩阵之间有相似变换关系。表明,在同一系统中,不同的状态向量所对应的系数矩阵之间有相似变换关系。
3.3 状态空间模型与输入-输出模型之间的关系 3.3.1 由状态空间模型推导输入-输出模型
传递函数矩阵的不变性 对于一个系统而言,其状态空间表达式不是唯一的,但其传递函数矩阵是不变的。
3.3.2 由输入-输出模型建立状态空间模型 实现:由输入-输出模型建立状态空间模型的过程称为实现。 最小实现:维数最小的实现。 本节讨论单输入-单输出系统的几种实现方法,即采用分解的方法,将一个n阶系统分解成n个一阶系统。传递函数的分解有三种方法:直接分解、串联分解、并联分解。 一、直接分解(虚拟输出法) 这种方法适用于传递函数的分母和分子多项式没有分解成因式的形式。
,按这种方法得到的状态空间模型,通常称为能控标准型。,按这种方法得到的状态空间模型,通常称为能控标准型。
二、串联分解 这种方法适用于传递函数已被分解为因式的形式,如
三、并联分解(部分分式法) 这种方法适用于传递函数的分母多项式已经分解为因式的形式,如 1、系统极点两两互异
例 已知控制系统的微分方程式为 试写出系统的状态空间模型。 解:
3.4 利用状态空间模型求解线性定常系统 3.4.1 线性定常系统状态方程的零输入响应 一、齐次状态方程的解 上式称为齐次状态方程,其解称为齐次状态方程的解(自由解,零输入响应)。
同理,当初始时刻为t0时,有 和 称为矩阵指数,也称为状态转移矩阵(见p.103,图3.11)。
于是,齐次状态方程的解为 系统的输出(响应)为
二、状态转移矩阵 1、定义 状态转移矩阵是满足如下矩阵方程和初值条件的唯一解: 2、状态转移矩阵是齐次状态方程 在初始状态为下列n个基向量
时的一个基本解矩阵。 3、状态转移矩阵的性质 (1) (2)
(3) (4) (5)状态转移矩阵的可交换性
(6) (7) 证明: 4、 矩阵指数函数和状态转移矩阵是从两个不同的角度所提出来的概念。矩阵指数函数是从数学的角度提出来的一个数学函数的名称,而状态转移矩阵是一个满足矩阵微分方程和初值条件的解,它表征了初始状态对某个时刻的状态转移关系,对于线性定常系统,其状态转移矩阵的数学表达式即是矩阵指数。
3.4.2 线性定常系统非齐次状态方程的解 考虑线性定常系统非齐次状态方程的解 经过简单推导,得