CMPUT 412 Actuation
CMPUT 412 Actuation. Csaba Szepesv ári University of Alberta. TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: A A A A A A A. Actuators. Sensors. Defining sensors and actuators. Environment. Sensations (and reward). actions. Controller = agent.

CMPUT 412 Actuation
E N D
Presentation Transcript
CMPUT 412Actuation Csaba Szepesvári University of Alberta TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAAAA
Actuators Sensors Defining sensors and actuators Environment Sensations (and reward) actions Controller = agent
Actuation Why? How? The process of sensing Characterizing sensors Some sensors
Actions • Effectors, actuators • Motors • Wheels • Wheeled locomotion
Actions for Moving Things • What moves? • Robot moves locomotion • Objects move manipulation
What Makes an Action Possible? • Effector = device on a robot that has an effect (impact or influence) on the environment • e.g. leg, wheel, arm, finger • Actuator = Mechanism that enables the effector to work • e.g. electrical motors, hydraulic or pneumatic cylinders
Tad McGeer’s passive walking robot Types of Actuation • Passive actuation • Utilizes potential energy • Examples • Nature: flying squirrels • Robots: walking • Active actuation • External energy transformed into motion
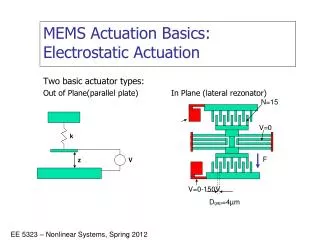
Incomplete! Active Actuation: How? • Electromagnetism • Electric motors • Pressure • Hydraulics (fluid pressure) • Pneumatics (air pressure) • Materials • Photo-reactive materials • Chemically reactive materials • Thermally reactive materials • Pizeoelectric materials (crystals) • Direction of motion: • Rotation • Linear
Power wires shaft Direct Current (DC) Motors • Advantages: Simple, inexpensive, easy to use, easy to find • Input: Voltage • “Right range” -> current drawn ~ work • work = force * distance • Powerout ~ torque * vrot Free running/stalled: p=0 • Speed: 3K-9K rpm (50-150rps) • Problem: Speed high, force low
Gearing: The Challenge • Purpose: Change the torque output of motors • Wheels: torqueout ~ torquein/radius why? Can decrease torque! • Problem: How to increase torque? • Solution: Gears
Output (2) Input (1) 3:1 gear reduction Gearing • Const ´ power ~ torque * vrot • vrot,2 = vrot,1/3 === torque2 = torque1 * 3
output input 9:1 gear reduction with ganged gears More Gearing • How to achieve 9:1 gear reduction? • Use larger gears • Use multiple gears • Issues: • Loosiness btw meshing gears Backlash • No loosiness increased friction energy waste • Solution: “Gearbox”
Servo Motors • Purpose: Instead of continuously rotating, move to agiven position Servo (Motors) • Components • DC Motor • Gear reduction • Position sensor • Controller • Input signal: pulse-width modulated • Position control vs. torque control
NXT Motor Wheel encoder Place for main shaft Gears Motor
No load, no servo, 9V No load, no servo, 7.2V 11.5 Ncm load, no servo, 9V NXT 11.5 Ncm load, servo, 9V 11.5 Ncm, load, servo, 7.2V NXT Motor: Servo Function Target RPM (% of max RPM) Source: http://www.philohome.com/nxtmotor/nxtmotor.htm
Moving the Robots Degrees of Freedom Controllable Degrees of Freedom
1DOF in 2D Rigid body in 3D 6DOF Moving the Robot • “Degrees of Freedom”: How many variables are needed to describe the configuration of the system in space?
Joints Saddle: 2DOF Hinge: 1DOF Plane: 1DOF Ball and socket: 3DOF
Controllable Degrees of Freedom • Controllable vs. uncontrollable DOF • Can cars get to anywhere?
Classification of Systems • TDOF = CDOF Holonomic • e.g. helicopter • TDOF > CDOF Nonholonomic • e.g. car • CDOF > TDOF Redundant • e.g. human armwithout hand 7DOF • 3 shoulder (ball&socket joint) • 1 elbow • 3 wrist
Summary • Effectors & actuators enable robots to produce movement: manipulation or locomotion • Actuators: many types, motors most common • Gears: change speed, torque • Servo motors: Complement DC motors • DOF != CDOF