World with Out GPS
World with Out GPS. Sep 2012. GPS – Global Position System . The GPS System Sends Data via Satellites : 1PPS Clock Based on Atomic , at 10^ -12 Accuracy UTC , TOD The GPS receivers decoders: 1PPS , 10MHz , at 10^ -12 Accuracy UTC , TOD , Global and Local 3D Global Position

World with Out GPS
E N D
Presentation Transcript
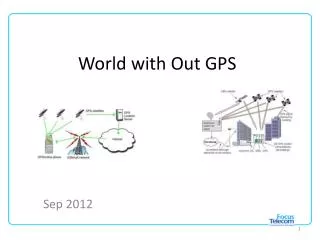
World with Out GPS Sep 2012
GPS – Global Position System • The GPS System Sends Data via Satellites : • 1PPS Clock Based on Atomic , at 10^-12 Accuracy • UTC , TOD • The GPS receivers decoders: • 1PPS , 10MHz , at 10^-12 Accuracy • UTC , TOD , Global and Local • 3D Global Position • 3D Speed and Accelerations
World with Out GPS ? • No Frequency Master • Data Communication Errors • UTC , TOD Errors • Position Errors
Communication Reference Frequency • 1PPS – 1 Pulse per Second • 1PPS is the Communication Reference Frequency • The 1PPS Source is created by a group of Atomic Reference Clocks and sends to GPS system • The 1PPS is distributed by the GPS worldwide
GPS reference Redundancy System • The GPS signals received and decoders • 1PPS,TOD, Position • The System Synchronized the High Stability frequency source to 1PPS • The System Outputs are 1PPS, 10MHz, UTC • When the GPS signals disappeared the System use the High Stability frequency source to creates the required Outputs at “Hold-Over”
Miniature CESIUM • 16cm3volume • 35g weight • 120mW power consumption • ±5.0E-11 accuracy at shipment • σy < 5 x 10-12 at τ = 1 hour short-term stability (Allan Deviation) • <3.0E-10/month aging rate
Hold Over • Hold Over is the Time that's the System works without GPS signal • At Hold Over the System runs on High Stability frequency source • The High Stability frequency source are drifting • The System Outputs drift with Time • The drifting value depends on the stability of the High Stability frequency source and Hold Over Time requirement .
Accuracy Holdover Stability Pull-in Range Stratum 1 1 x 10-11 Not Defined Not Defined 1 x 10-10 per day, 1st 24 hrs. Stratum 2 1.6 x 10-8 1.6 x 10-8 1 x 10-8 per day, 1st 24 hrs. Stratum 3E 4.6 x 10-6 4.6 x 10-6 < 255 DS1 slips, 1st 24 hrs. Stratum 3 4.6 x 10-6 4.6 x 10-6 Stratum 4 SMC 3.2 x 10-5 2.0 x 10-5 Not Defined 4.6 x 10-6 3.2 x 10-5 2.0 x 10-5 ANSI Clock Standards
UTC & TOD Source • Coordinated Universal Time (UTC) is the primary time standard by which the world regulates clocks and time. It is one of several closely related successors to Greenwich Mean Time (GMT). For most common purposes, UTC is synonymous with GMT, but GMT is no longer precisely defined by the scientific community. • TOD – local Time Of Day • At Hold-Over the TOD creates by local server .
Position by INS Systems • A guidance system is a device or group of devices used to navigate a ship, aircraft, missile, rocket, satellite, or other craft. Typically, this refers to a system that navigates without direct or continuous human control. Systems that are intended to have a high degree of human interaction are usually referred to as a navigation system. • A guidance system has three major sub-sections: Inputs, Processing, and Outputs. The input section includes sensors, course data, radio and satellite links, and other information sources. The processing section, composed of one or more CPUs, integrates this data and determines what actions, if any, are necessary to maintain or achieve a proper heading. This is then fed to the outputs which can directly affect the system's course. The outputs may control speed by interacting with devices such as turbines, and fuel pumps, or they may more directly alter course by actuating ailerons, rudders, or other devices.