BraKet notation
BraKet notation We generalize the definitions of vectors and inner products ("dot" products) to extend the formalism to functions ( like QM wavefunctions ) and differential operators. v = v x x + v y y + v z z S n v n n then the inner product is denoted by v u =. ^. ^. ^. ^.

BraKet notation
E N D
Presentation Transcript
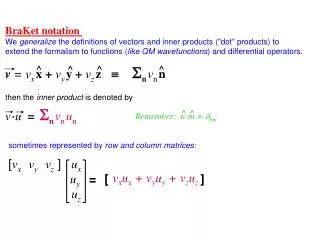
BraKet notation We generalize the definitions of vectors and inner products ("dot" products) to extend the formalism to functions (like QM wavefunctions) and differential operators. v = vxx + vyy + vzzSnvnn then the inner product is denoted by vu = ^ ^ ^ ^ Snvnun ^ ^ Remember: nm = nm sometimes represented by row and column matrices: [vxvyvz] ux uy= [ ] uz vxux + vyuy + vzuz
We most often think of "vectors" in ordinary 3-dim space, but can immediately and easily generalize to COMPLEX numbers: vu =Sn [vxvyvz] ux uy = [ ] uz Snvn*un * * * vx*ux + vy*uy + vz*uz transpose column into row and take complex conjugate and by the requirement < v| u> = < u| v>* we guarantee that the “dot product” is real
Every “vector” is a ket : |v1> |v2> including the unit “basis” vectors. We write: | v > = Sn| > and the scalar product by the symbol < | > and the orthonormal condition on basis vectors can be stated as < | > = d Now if we write |v1> = SC1n|n>and |v2> = SC2n|n> then “we know”: < v2 | v1 > = SnC2n*C1n = S because of orthonormality < v2 | | v1 > = Sm “bra” Cnn v u m n mn Sn,mC2m* C1n<m|n> SmC2m* <m|SmC1n|n>
C1n So what should this give? < n | v1 > = ?? So if we write |v > = SCn|n> = Sn|n> = Sn = {Sn } = <n|v> |n><n|v> 1 |v> |v> |n><n| |v> Remember: < m | n > gives a single element 1 x 1 matrix but: | m > < n | gives a???
Sn|n><n| In the case of ordinary 3-dim vectors, this is a sum over the products: [ 1 0 0 ] [ 0 1 0 ] [ 0 0 1 ] 1 0 0 0 1 0 0 0 1 + + 1 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 1 = + + 1 0 0 0 1 0 0 0 1 =
Two important BASIC CONCEPTS • The “coupling” of a fermion • (fundamental constituent of matter) • to a vector boson • (the carrier or intermediary of interactions) e- • Recognized symmetries • are intimately related to CONSERVED quantities in nature • which fix the QUANTUM numbers describing quantum states • and help us characterize the basic, fundamental interactions • between particles
Should the selected orientation of the x-axis matter? As far as the form of the equations of motion? (all derivable from a Lagrangian) As far as the predictions those equations make? Any calculable quantities/outcpome/results? Should the selected position of the coordinate origin matter? If it “doesn’t matter” then we have a symmetry: the x-axis can be rotated through any direction of 3-dimensional space or slid around to any arbitrary location and the basic form of the equations…and, more importantly, all the predictions of those equations are unaffected.
If a coordinate axis’ orientation or origin’s exact location “doesn’t matter” then it shouldn’t appear explicitly in the Lagrangian! EXAMPLE:TRANSLATION Moving every position (vector) in space by a fixed a (equivalent to “dropping the origin back” –a) –a original description of position r r' or new description of position
For a system of particles: function of separation acted on only by CENTAL FORCES: no forces external to the system generalized momentum (for a system of particles, this is just the ordinary momentum) for a system of particles T may depend on q or r but never explicitly on qi or ri =
For a system of particles acted on only by CENTAL FORCES: ^ a -Fi net force on a system experiencing only internal forces guaranteed by the 3rd Law to be 0 Momentum must be conserved along any direction the Lagrangian is invariant to translations in.
Particle properties/characteristics specifically their interactions are often interpreted in terms of CROSS SECTIONS.
For elastically scattered projectiles: The recoiling particles are identical to the incoming particles but are in different quantum states Ef , pf Ei , pi EN , pN The initial conditions may be precisely knowable only classically! The simple 2-body kinematics of scattering fixes the energy of particles scattered through .
Nuclear Reactions Besides his famous scattering of particles off gold and lead foil, Rutherford observed the transmutation: or, if you prefer Whenever energetic particles (from a nuclear reactor or an accelerator) irradiate matter there is the possibility of a nuclear reaction
Classification of Nuclear Reactions • inelastic scattering • individual collisions between the incoming projectile and a single target nucleon; the incident particle emerges with reduced energy • pickup reactions • incident projectile collects additional nucleons from the target • O + d O + H (d, 3H) • Ca + He Ca + (3He,) 16 8 3 1 15 8 41 20 3 2 40 20 • stripping reactions • incident projectile leaves one or more nucleons behind in the target Zr + d Zr + p 90 40 (d,p) (3He,d) 91 40 Na + He Mg + d 23 11 3 2 24 12
[ Ne]* 20 10
The cross section is defined by the ratio rate particles are scattered out of beam rate of particles focused onto target material/unit area a “counting” experiment notice it yields a measure, in units of area number of scattered particles/sec incident particles/(unit area sec) target site density how tightly focused or intense the beam is density of nuclear targets With a detector fixed to record data from a particular location , we measure the “differential” cross section: d/d.
scattered particles Incident mono-energetic beam v Dt A dW N = number density in beam (particles per unit volume) Solid angle dWrepresents detector counting the dN particles per unit time that scatter through qinto dW Nnumber of scattering centers in target intercepted by beamspot FLUX = # of particles crossing through unit cross section per sec = NvDt A / Dt A = Nv Notice: qNv we call current, I, measured in Coulombs. dN NF dW dN = s(q)NF dW dN =NFds -