Download
1 / 19
220 likes | 525 Views
Special theory of relativity. Failure of Newtonian mechanics. Newton. Revision: Still remember Newton's 3 law of motion ?. An object at rest will always be in the wrong place An object in motion will always be headed in the wrong direction

E N D
Special theory of relativity Failure of Newtonian mechanics Newton
Revision: Still remember Newton's 3 law of motion? • An object at rest will always be in the wrong place • An object in motion will always be headed in the wrongdirection • For every action, there is an equal and opposite criticism =b, just joking
Newtonian view of space and time space and time are absolute and do not mix Newtonian relativity: (1) all mechanics laws are the same (invariant) in all inertial frames (2) Galilean transformation
Inertial frames • Definition • E.g. of inertial frames: the lab frame and the constant speed car frame • All inertial frames are equivalent
Galilean transformation relates the kinematical quantities, such as position, velocity, acceleration between two inertial frames
O: stationary frame (uses x,y,z,t as their coordinates) O’: moving wrp to O with constant speed u away from O (uses x’,y’,z’,t’ as their coordinates) Galilean transformation for the coordinates (in 1-D): x’ = x – ut, y’ = y, z’=z, t’ = t Galilean addition law for velocity (in 1-D): v’x = vx - u Simply a daily experience
One can derive the invariance of Newtonian law of mechanics in all inertial frame from Galilean transformation: In O: F = m dv/dt = ma In O’: F’ = m’ dv’/dt’ = m’ a’ In Newtonian view, m’ = m, t’ = t; for inertial frames: du/dt = du/dt’ = 0 The point is: Newton’s law takes on the same form in all inertial frames – Galilean transformation guarantees that Newton’s laws of mechanics are the same in all inertial frames
Newtonian view fails when applied to light • However, Galilean transformation is going to fail when uis approaching the speed of light – it has to be supplanted by Lorentz transformation • Galilean transformation is inconsistent with Maxwell theory of light – a gadanken case: the EM wave is ``frozen’’ and not waving anymore in an inertial frame moving at the speed of light • Newtonian law of invariance fails for EM
Galilean transformation on light is also rejected based on the law of cause and effect (causality)
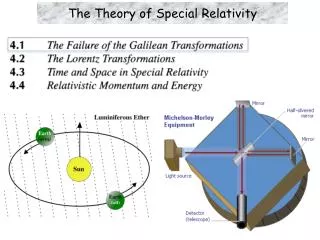
Ether and Michelson-Morley Experiments • In early 19th century • Ether: medium for light to propagate at a speed of 3x108m/s (analogue to sound propagate in the mechanical medium of air at speed 330m/s) • ‘the fifth element’ • thought to be the `absolute frame of reference’ that goes in accordance with Newtonian absolute space and time • One can imagine that ether frame is fixed wrp to the Sun
If exist the Ether wind will `drift’ with a relative speed of u wrp to Earth • The ether drift u can be measured by observing the effect that arises in speed of light when the Earth is moving in different direction • Analogy: speed of sound can be measured by ‘talking’ in different directions in the wind
Talking in the wind in and opposing the direction of wind blowing
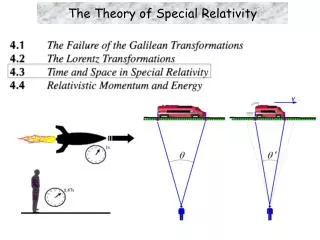
Two light beams having a difference in phase, Df, will interfere to produce interference pattern (recall this from optics) • Dfarises because the time of arrival at a common point in space by the two beams are different, t1 not equal tot2
t1not equal to t2 due to Galilean transformation assumed on the the speed of light for the two beams • t1(parallel to the ether drift) = d /(c - u) + d /(c + u) = 2dc /(c2 - u2) • t2(perpendicular to the ether drift)= 2d /(c - u)1/2 • Dt approx du2/c2 • Df = n 2p c|t1- t2| / l (for constructive interference)
What would you expect if the orientation of the experimental set up is rotated 90 degree? • A change in the interference pattern • The MM apparatus is sensitive to detect very minute change in the interference pattern up to a number of fringe shift = 2 (d/l) (u/c) 2 approx 0.4
But MM sees only NULL result – no change in the interference pattern • Maxwell theory of EM is inconsistent with Newtonian notion of an absolute reference frame • Einstein said EM is right, the Ether frame notion is wrong • Need to revise the Galilean transformation for a consistent picture of EM and mechanics