Download
1 / 55
550 likes | 731 Views
IE1206 Inbyggd Elektronik. F1. F2. PIC-block Dokumentation, Seriecom Pulsgivare. I , U , R , P , serie och parallell. F3. Ö1. KK1 LAB1. Pulsgivare, Menyprogram. Start för programmeringsgruppuppgift. Kirchoffs lagar Nodanalys Tvåpolsatsen R2R AD. Ö2. F4.

E N D
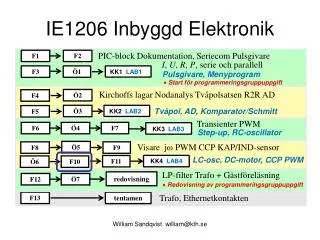
IE1206 Inbyggd Elektronik F1 F2 PIC-block Dokumentation, Seriecom Pulsgivare I, U, R, P, serie och parallell F3 Ö1 KK1 LAB1 Pulsgivare, Menyprogram Start för programmeringsgruppuppgift Kirchoffs lagar Nodanalys Tvåpolsatsen R2R AD Ö2 F4 Tvåpol, AD, Komparator/Schmitt Ö3 F5 KK2 LAB2 Transienter PWM F6 Ö4 F7 KK3 LAB3 Step-up, RC-oscillator Ö5 Visare j PWM CCP KAP/IND-sensor F8 F9 LC-osc, DC-motor, CCP PWM F11 KK4 LAB4 Ö6 F10 LP-filter Trafo + Gästföreläsning redovisning F12 Ö7 Redovisning av programmeringsgruppuppgift F13 tentamen Trafo, Ethernetkontakten William Sandqvist william@kth.se
Hur mäter man pulser? Att mäta olika digitala pulser är en av PIC-processorns huvuduppgifter ? William Sandqvist william@kth.se
Pulser från otaliga sensorer Otaliga givare har som utstorhet någon form av digitala pulser: antal, tid, periodtid, frekvens, dutycycle …Här följer några exempel: Medströmsmätare. Omloppskulan strömmar med vätskan och passerar fotodioden varje varv. Givaren används som bensin-mätare, antalet pulser från foto-dioden summeras som förbrukat bränsle. William Sandqvist william@kth.se
ex. Antal Kugghjulsmätare. Vätska förflyttas i ”kuggluckorna”. Inget läckage, kan mäta mycket små vätskemängder (upplösningen är volymen i en kugglucka). Används som bensinmätare på bensinstationerna. Antalet vridningsvarv är ett mått på vätskemängden. William Sandqvist william@kth.se
Propeller och turbin -mätare Pulsfrekvensen är proportionell mot strömningshastigheten. William Sandqvist william@kth.se
ex. Pulstid Momentmätare.Då ett vridmoment överförs med en roterande axel vrids (skjuvas) denna så att kugg-hjulen vrids i förhållande till varandra. Det blir en blir en mätbar tids-skillnad mellan pulserna från givar-elementen, som känner av kuggtopparnas passage. Vridmomentet kan räknas fram utifrån denna tids-skillnad med kännedom om axelns vridstyvhet. William Sandqvist william@kth.se
ex. Pulstid Laser Scan Micrometer. Mätobjektets diameter skuggar laserljuset. En upplösning om 1 m är möjlig. William Sandqvist william@kth.se
Så här kontrolleras en kamaxels toleranser! Försäljarens önskedröm:Datoriserat mätsystem. Här har man lyckatssälja 6 st enheter! William Sandqvist william@kth.se
S Fe S N Fe N Vissa krav ställs på de magnetiska egenskaperna. Induktiv pulsgivare e e William Sandqvist william@kth.se
Styrning av förbränningsmotor Induktiv pulsgivare Induktiv pulsgivare William Sandqvist william@kth.se
ex. Pulstid, antal Personbilarnas förbränningsmotorer: index Induktiv pulsgivare Varvtal och vinkel mäts mot ett kugghjul (”startkransen”) med en induktiv pulsgivare. Givaren ger en puls för varje kuggtopp. Varvtalet räknas ut från pulstiden mellan två kuggtoppar. Ett ”indexmärke” markerar vinkeln 0°. (Alternativt kan en kugge ”saknas” vid 0°). William Sandqvist william@kth.se
ex. Låg pulsfrekvens En pulsgivare integrerad i hjullagret ger en pulsfrekvens som är proportionell mot hjulets varvtal. ”Låst” hjul innebär låg pulsfrekvens. ABS-bromsar. När hjulet ”låser sig”, släpper det greppet mot marken. Detta upptäcker ABS-systemet och ”minskar” då på bromstrycket. William Sandqvist william@kth.se
Givare integreras numera ofta i rena verkstadsprodukter Hjullagerenhet med integrerad ABS-sensor. SKF. William Sandqvist william@kth.se
Induktiv ABS-givare (spole) Det tandade metallhjulet är inbakat i kullagrets plast-tätning! (ex. SKF) William Sandqvist william@kth.se
f Kapacitiv tryckgivare P1 P2 Differentialkondensator för tryckskillnad William Sandqvist william@kth.se
f1 f2 Enkel mätutrustning ? 74HC14 Sex CMOS Schmitt-trigger inverter Två oscillatorer byggs nära differentialkondensatorerna. Frekvenserna f1 och f2 mäts. Bildar man kvoten mellan frekvenserna får man en storhet där allt som påverkat givarna lika undertrycks ( = kan förkortas bort ). William Sandqvist william@kth.se
Noggrann mätning av f Mätning av frekvens kan ske mycket noggrant. Mycket noggrannare än andra mätningar. Sensorerna avger pulser av mycket varierande utseende och frekvenser – det finns inte en enda mätmetod som kan täcka alla mätfall. PIC-processorn har tre olika TIMER’s och en CCP-enhet för detta. Processorklockan kan genereras med åtta olika metoder. William Sandqvist william@kth.se
Frekvensmätning Hög frekvens Kvantisering.Räknaren räknar bara ”hela” pulser. Direkt frekvensmätningAntalet positiva flanker p under en period av TREF räknas (TREF=1/fCLK). Hög mätfrekvens fMÄT tillsammans med lång mättid TREF minimerar inverkan av kvantiseringsfelet. William Sandqvist william@kth.se
Frekvensmätning Lägre frekvens Prescale Lägre mätfrekvens kräver att mättiden förlängs genom att man delar ned referens-frekvensen fCLK med en prescaler. William Sandqvist william@kth.se
Periodtidmätning Låg frekvens Alternativt kan man vid låg mätfrekvens göra en periodtidmätning. Detta är indirekt frekvensmätning. Mätfrekvensen får man genom att invertera räknevärdet. Under en period av mätsignalen räknar man n klockpulser. William Sandqvist william@kth.se
Multiperiodtidmätning Högre frekvens Högre mätfrekvenser kan mätas med multiperiodtid-mätning. Mätfrekvensen delas då ned med en faktor k innan mätningen (registrera var 4:e eller var 16:e flank). PIC-processorn är förberedd för alla dessa olika mätmetoder. (Och många fler … ) William Sandqvist william@kth.se
Klockfrekvensens noggrannhet Förutom kvantiseringsfel, dvs. att man bara räknar hela pulser, kommer man alltid att ha ett relativt fel som är lika stort som referensfrekvensens fel. Ex. Armbandsur kräver kristall. Kristaller har typiskt fel f 20 ppM (parts per million). f = 4 MHz 80 Hz. Önskemål: uret får inte dra sig mer än 10 sek/månad. 10s/(30[dgr]·24[tim]·60[min]·60[sek]) = 25 ppM. William Sandqvist william@kth.se
Klockfrekvensens noggrannhet Ex. Tidtagarur som ska användas till ett800 m lopp. ( 2 minuters total mättid räcker troligen )Önskemål: upplösning 0,01 sek.1/(2[min]·60[sek]·100) = 1 ‰. En RC-oscillator har typiskt 5% fel, om den inte trimmas. ( R 1%, men C sällan bättre än 5% ) PIC16F690-processorns inre RC-oscillator ärfabrikstrimmad till1%.Detta räcker inte … men den går att fintrimma! William Sandqvist william@kth.se
PIC-processorns klockmodul William Sandqvist william@kth.se
PIC-processorns klockmodul Vid laborationerna använder vi standardinställningen, default,4 MHz – som gör det enkelt att beräkna exekveringstid. 10000(min) – 00000 (fabrikstrim) – 01111(max) Om man har möjlighet att ”trimma själv” så kan den fabrikstrimmade frekvensen justeras i 16 små steg till 0,5‰. Nu tillräckligt för tidtagaruret! William Sandqvist william@kth.se
Yttre kristall Samma slags krets som till kursens LC-oscillatorlab. PIC-processorerna kan använda yttre kristall. C1 och C2 kan man ”skolka ifrån” på kopplingsdäck, men de är nödvändiga på ett mönsterkort. William Sandqvist william@kth.se
Piezoelektrisk kristall Tillför man ström (laddning) till en ”bergkristall” komprimeras den, när den sedan ”fjädrar” tillbaka avger den ström. Elektriskt kan kristallen jämföras med en resonanskrets – med extremt högtQ-värde. William Sandqvist william@kth.se
Piezoelektrisk kristall Extremt högt Q-värde! William Sandqvist william@kth.se
Yttre klockfrekvenssignal PIC-processorerna kan använda yttre klockfrekvenssignal. Har man tillgång till en exakt frekvens kan PIC-processorn bli lika exakt. ( Bilden visar en sådan extern klockmodul med oscillator och kristall ”allt i ett” ). William Sandqvist william@kth.se
Atom-normal? Radiokontrollerade klockor från tex. Claes Ohlsson & co är låsta till en atomnormal i tyskland.Det kan faktiskt gå att få tag på extremt noggrann referensfrekvens till lågt pris! En sådan klockmodul ger en puls per sekund (med undantag för sekund nr 60). En så kallad PPS-signal. William Sandqvist william@kth.se
Låg klockfrekvens RC Schmitt-trigger När frekvensnoggrann-heten inte har så stor betydelse– yttre RC-krets. Datainsamling av ett mätvärde om dagen kräver ingen hög klockfrekvens. Man kan sedan ändra/höja klock-frekvensen i programmet när processorn ska avrapportera! Ju lägre klockfrekvens desto lägre strömför-brukning, och mindre risk för att PIC-processornavger störningar William Sandqvist william@kth.se
PIC 16F690 Timer1 Egen oscillator för klock-kristaller! 32768 Hz William Sandqvist william@kth.se
PIC 16F690 Timer1 Antal eller fosc/4 Gate Count enable Antal Gate Processorklockan William Sandqvist william@kth.se
PIC 16F690 Timer1 Timer1 är en 16-bitars timer/counter. Man når den genom två 8-bitars-register TMR1H och TMR1L. En flagga TMR1IF sätts om timern räknat runt. Måste 0-ställas ifall man vill veta om detta sker igen.Timer1 kan använda en egen oscillator – för 32768 Hz tidtagarkristaller, eller processorklockan. Timer 1 har sedan en Prescaler {1:1,1:2,1:4,1:8}. prescaler 0 0 1 0 0 1 Inställning vid frekvesmätningslab. William Sandqvist william@kth.se
Hur läser man från en 16-bit "free running" Timer1? Timer1 är en 16-bitarsräknare. Den måste läsas av som två 8-bitarstal, de 8 mest signifikanta bitarna TMR1H och de 8 minst signifikana bitarna TMR1L. Detta kan vara ett problem eftersom Timern kan "slå runt" mellan avläsningarna av 8-bits talen. Följande kod visar det säkra sättet: longunsignedint time; char TEMPH; char TEMPL;TEMPH = TMR1H; TEMPL = TMR1L;if (TEMPH == TMR1H) // Timer1 not rolled over = good value { time = TEMPH*256; time += TEMPL; }else // Timer1 rolled over - no new rollover for some time // lots of time to read new good values { time = TMR1H*256; time += TMR1L; } OK direkt OK nu William Sandqvist william@kth.se
Hur skriver man till en 16-bit "free running" Timer1? Det kan också vara problematiskt att skriva till en 16-bitarsräknare eftersom det måste ske som två 8-bitarstal. Detta är det säkra sättet: TMR1L = 0; // clear low byte = no rollover for some timeTMR1H = 12345/256; // high byte of constant 12345TMR1L = 12345%256; // low byte of constant 12345 Talet 12345 ryms i 16 bitar. Med heltalsdivision / och modulo % delas en konstant enkelt upp i två 8-bitarsdelar. Ett annat sätt är att använda hexadecimala konstanter: 1234510 = 303916 TMR1H=0x30 TMR1L=0x39 William Sandqvist william@kth.se
CCP synkroniseringsregister ECCP-enheten, Enhenced Capture/Compare/(PWM) Man kan undvika att skriva till och läsa från Timer1-registren – det finns synkroniserade register i ECCP-enheten för detta! CCPR1H och CCPR1L William Sandqvist william@kth.se
ECCP Capture modes När Capture-händelsen inträffar så kopieras Timer1 direkt över till CCPR1H och CCPR1L där de kan läsas i ”lugn och ro”. Biten CCP1IF sinalerar detta. Den måste vi sedan nollställa. 1 - 0 0 1 - - - Periodtidmätning Multiperiodtid mätning William Sandqvist william@kth.se
Setup Timer1 Timer1, så snabbt som möjligt: // Setup TIMER1/* 0.x.xx.x.x.x.x TMR1 gate not invert x.0.xx.x.x.x.x TMR1 gate not enable x.x.00.x.x.x.x Prescale 1:1 x.x.xx.0.x.x.x TMR1-oscillator is shut off x.x.xx.x.1.x.x no input clock-synchronization x.x.xx.x.x.0.x Use internal clock f_osc/4 x.x.xx.x.x.x.1 TIMER1 is ON*/T1CON = 0b0.0.00.0.1.0.1 ; Tydlig kommentar som visar hur T1CON värdet tagits fram. William Sandqvist william@kth.se
Setup ECCP CCP1, fånga tiden för positiva flanker: // Setup CCP1/* 00.00.xxxx -- -- xx.xx.0101 Capture each positive edge*/CCP1CON = 0b00.00.0101 ; William Sandqvist william@kth.se
Vänta på flankerna 16-bitarstal unsignedlong T, f, t1, t2; CCP1IF = 0 ; // reset the flagwhile (CCP1IF == 0 ) ; // wait for capturet1 = CCPR1H*256;t1 += CCPR1L;CCP1IF = 0 ; // reset the flagwhile (CCP1IF == 0 ) ; // wait for next capturet2 = CCPR1H*256;t2 += CCPR1L; T = t2 - t1; // calculate periodf = 1000000U/T; // calculate frequency t1 t2 William Sandqvist william@kth.se
t2 – t1 unsignedlong T, f, t1, t2; Vad händer om t1 > t2 (100-65636)? Skillnaden t2-t1 räknas modulo 216 så antalet tick mellan t1 och t2 blir därför alltid det korrekta värdet ”varvet runt”! Stopp Start Det är en bra idé att kontrollera sina funderingar med Codepad C-kompilator online. William Sandqvist william@kth.se
(Codepad Online C-kompilator) Det är bekvämt att prova sina beräkningsformler med en vanlig C-kompilator. Man måste då ta hänsyn till att PIC-processorn har andra variabelstorlekar än vad som brukar vara standard. Man måste skriva ut resultaten med den ”modul” PIC-processorn använder. // int in Codepad is 32 bit// int in Cc5x PIC is 8 bit// long int in Cc5x PIC is 16 bit int a= -25; printf(”PIC int a=%d”, a%256);printf(”PIC long int a=%d”, a%pow(2,16)); Cc5x-kompilatorn följer inte C-standard (detta av prestandaskäl). Man behöver läsa manualen, och man behöver ”provköra” beräkningsdelen av sitt program med hårdvaran för att se att man förstått rätt. William Sandqvist william@kth.se